
Abstract
IMU rotation of an inertial navigation system (INS) can bound the free propagation of the INS error introduced by the drifts of inertial sensors. The rotation scheme of the IMU will directly affect the accuracy, structure and costs of the system. A reasonable rotation scheme should remove most of the system errors arising from the drifts of the inertial sensors, and at the same time, should not introduce other additional errors. First, this paper discusses the design and analysis approach of the rotation scheme based on the error propagation equations of the INS. Then, a conventional 8-position rotation scheme is analyzed for the applications of the optical gyro INS, and its drawbacks are discussed in detail. Following these, an improved 8-position rotation scheme and a novel 16-position rotation scheme are proposed for the optical gyro INS, and their merits are also discussed. Simulation results have shown that the 16-position rotation scheme, which can compensate not only the drifts but also the scale factor errors and the misalignment errors of the inertial sensors, is the best rotation scheme and can be used as a practical solution to compensate the drifts of the inertial sensors in the rotational INS.
Export citation and abstract BibTeX RIS
1. Introduction
Accompanying the advent of optical gyros, namely ring laser gyro and fiber optical gyro, a new class of inertial navigation system (INS) named rotational INS (Levinson and Majure 1987, Titterton and Weston 2004, Renkoski 2008) was proposed based on the strapdown INS and the rotation technique. In the rotational INS, the IMU is mounted on a multi-axis rotation platform with goniometers, a device used to measure the rotation angle, and periodically rotates along with the heading and roll axes to remove the navigation errors introduced by the drifts of inertial sensors.
The rotational INS, which has high accuracy and is cost effective, was initiated by NATO in the 1980s for marine inertial navigation systems. It has been gradually substituting the gimbal INS reaching the service life, and has been equipped to many NATO and US warships and submarines. Nowadays, the widely equipped rotational INS includes two types, the single-axis rotational INS and the dual-axis rotational INS. MK39 MOD3C and WSN-7B (Sperry Marine 2005, Lahham et al 2000) belong to single-axis systems, and MK49 and WSN-7A (Levinson et al 1994, Lahham and Brazell 1992) are dual-axis systems. It is also reported that the FOG triple-axis rotational INS is under development (Adams and Gokhale 2000, Heckman and Baretela 2000, Morrow and Heckman 1998).
The rotation scheme of the rotational INS will directly affect the navigation accuracy, structure and costs of the system (Zha et al 2010). An improper rotation scheme will increase the navigation errors and deteriorate the system performances, so the rotation scheme should be carefully designed. The rotation scheme for the single-axis rotational INS is relatively simple, where the IMU just periodically rotates around a single rotation axis with four angle positions ( − 135°, +45°, +135°, −45°) (Levinson and San Giovanni 1980). The single-axis rotational INS cannot remove the drift of the inertial sensor with the input axis coinciding with the rotation axis, so the accuracy of the single-axis rotational INS is limited. To remove the drifts of all the inertial sensors and to improve the overall navigation accuracy, the rotation scheme should be designed based on dual-axis or triple-axis rotation mechanization.
For the dual-axis rotational INS, the system error propagations are complicated. If the rotation scheme is improper, the navigation errors introduced by the drifts of the inertial sensors cannot be completely compensated, and at the same time, some new navigation errors will be introduced from the coupling of the rotation and the scale factor errors or the misalignment errors of the inertial sensors. So, compared to the single-axis rotation scheme, the dual-axis rotation scheme is more complicated, and attention should be paid to several specific design details.
In the remainder of this paper, the error propagation characteristics of the rotational INS will be discussed and the design approach of the multi-axis rotation scheme will be presented first. Then, a conventional 8-position rotation scheme for the dual-axis rotational INS will be analyzed and its defects will be discussed. Based on these, an improved 8-position rotation scheme and a novel 16-position rotation scheme for the dual-axis rotational INS will be designed and proposed. Finally, the performances of these rotation schemes will be compared by simulations, and the conclusions will be presented.
2. Design principles of the rotation scheme for the rotational INS
2.1. Error propagation equations of the rotational INS
The rotational INS evolved from the strapdown INS, so its error propagation should be the same as the general strapdown INS. The derivation of the INS error propagation equations has two approaches: the phi-angle-based approach and the psi-angle-based approach (Benson 1975, Goshen-Meskin and Bar-Itzhack 1992). Because these two approaches are equivalent (Benson 1975), this paper will adopt the phi-angle error equations to express the error propagation characteristics of the rotational INS:


where b, n, e and i represent the body frame, the local level navigation frame, the Earth frame and the inertial frame, respectively. φ represents the misalignment angle of the 'mathematical platform', v and δv represent the velocity and the velocity error, ω and δω represent the angular rate and the angular rate error, f and δf represent the specific force and the specific force error, δg represents the gravity error and Cnb represents the attitude matrix.
The angular rate error,δωbib, in (1) comes from the gyros' measurement errors which are mainly composed of the drifts, the scale factor errors and the axis misalignment errors of the gyros. Similarly, the specific force error, δfb, comes from the accelerometers' measurement errors which are mainly composed of the drifts, the scale factor errors and the axis misalignment errors of the accelerometers. Define two new variables as follows:


where εn and ∇n are used to express the angular rate error and the acceleration error of the 'mathematical platform', respectively. Based on the above definitions, the error equations of the rotational INS can be transformed into


According to (3)–(6), the error compensation principle of the rotational INS can be stated as follows: periodically change the value of the attitude matrix Cnb and make the integrals of the error terms εn and ∇n zero in a rotation cycle. Theoretically, if the design of the rotation scheme is proper, the system errors introduced by the inertial sensors can be largely removed and the navigation accuracy will be dramatically improved.
2.2. Design principles of the rotation scheme
According to the analysis of subsection 2.2, the aim of the rotation scheme design is to make the integrals of εn and ∇n zero in a rotation cycle. Specifically, a reasonable rotation scheme should fulfill the following two rules: (I) remove as much as possible navigation errors introduced by the drifts of the inertial sensors, and (II) reduce as much as possible the navigation errors introduced by the scale factor errors and the axis misalignment errors of the inertial sensors. Because the system error of the INS is mainly determined by the gyros, the following part of this subsection will focus on the rotation scheme design based on the error analysis to the gyros.
- (1)Compensation of the gyro driftsGiven that only gyro drifts exist in the system:where ε1, ε2 and ε3 represent the drifts of the three orthogonal gyros in the rotational INS. Then, according to (3), (5) and (7), the misalignment angle of the 'mathematical platform' caused by the gyro drifts can be computed as follows:
 If the value of φ computed from (8) is equal to zero, it means that the misalignment angle of the 'mathematical platform' is zero. Regardless of other error sources, the final navigation errors should be zero. So, to compensate the gyro drifts, the rotation scheme should be designed based on equation (8) by making the value of φ zero.
If the value of φ computed from (8) is equal to zero, it means that the misalignment angle of the 'mathematical platform' is zero. Regardless of other error sources, the final navigation errors should be zero. So, to compensate the gyro drifts, the rotation scheme should be designed based on equation (8) by making the value of φ zero. - (2)Compensation of the gyro scale factor errors and the axis misalignment errors


Supposing that only gyro scale factor errors and axis misalignment errors exist in the system, the measurement error of the gyros can be expressed as follows:

where  is the angular rate projected in the body frame,
is the angular rate projected in the body frame,  is the angular rate projected in the navigation frame, Cbn is the transpose of the attitude matrix Cnb and Δ is the matrix of the scale factor errors and axis misalignment errors. The matrix Δ can be expressed as follows:
is the angular rate projected in the navigation frame, Cbn is the transpose of the attitude matrix Cnb and Δ is the matrix of the scale factor errors and axis misalignment errors. The matrix Δ can be expressed as follows:

where Δii (i = 1, 2, 3) represents the scale factor error of the ith gyro, and Δij (i, j = 1, 2, 3 and i ≠ j) represents the misalignment errors of the three axes of the gyros.
According to (3), (5) and (9), the misalignment angle of the 'mathematical platform' caused by the gyro scale factor errors and the axis misalignment errors can be computed as follows:

So, to compensate the gyro scale factor errors and the axis misalignment errors, the rotation scheme should be designed based on equation (11) by making the value of φ zero.
3. Analysis of a conventional 8-position rotation scheme
For the INS, using the electrostatic gyros, an 8-position rotation scheme has been used to remove the errors of the electrostatic gyros (Gao 2004). The electrostatic gyro and the relating INS are quite different from the optical gyro and the relating INS, so the direct application of the existing 8-position rotation scheme to the optical gyro-based rotational INS might be improper. Succeeding analysis will prove that, when used for the optical gyro-based rotational INS, although the conventional 8-position rotation scheme can remove the drifts of the inertial sensors, it will introduce other kinds of error sources having larger influences than the drifts.
Given that the initial angle position of the IMU is at A and the rotation rate is ω = π/TR, the IMU rotation sequences of the conventional 8-position rotation scheme can be described as follows: (1) rotate 180° along with the positive U-axis and arrive at position B, and stay TS seconds at position B; (2) rotate 180° along with the positive E-axis and arrive at position C, and stay TS seconds at position C; (3) rotate 180° along with the negative U-axis and arrive at position D, and stay TS seconds at position D; (4) rotate 180° along with the negative E-axis and arrive at position A, and stay TS seconds at position A. The rotation sequences (5)–(8) are the same as (1)–(4) but with opposite rotation directions. The above rotation process is shown in figure 1.

Figure 1. The conventional 8-position rotation scheme.
Download figure:
Standard imageAccording to section 2, in order to analyze the performances of the error compensation scheme shown in figure 1, the attitude matrix Cnb at different times should be computed first.
Given that the initial body frame, b, coincides with the navigation frame, n, and ignoring the translational movement between the body frame and the navigation frame, the attitude matrix Cnb at angle positions A, B, C and D can be computed as follows:

Given that the start time of each rotation is zero, the attitude matrix Cnb for the rotation sequences (1) to (4) can be computed as follows:

According to figure 1, the attitude matrix Cnb for the rotation sequences (5) to (8) can be easily obtained by reversing the sign of ω in (13).
According to the analysis approach discussed in section 2 and the attitude matrix Cnb given in (12) and (13), the succeeding part of this section will analyze whether this conventional 8-position rotation scheme is suitable for the rotational INS using the optical gyros.
- (1)Analysis of the compensation of the gyro driftsAccording to (8), the misalignment angle of the 'mathematical platform' caused by the gyro drifts can be expressed as follows:Insert (12) and (13) into (14), and the misalignment angle can be computed to be zero:Equation (15) indicates that the misalignment angle of the 'mathematical platform' caused by the gyro drifts is zero in a rotation cycle, which means that the conventional 8-position rotation scheme can compensate all the navigation errors introduced by the gyro drifts.
- (2)Analysis of the compensation of the gyro scale factor errors and the axis misalignment errors


To simplify the analysis, the Earth's rotation will be ignored. The coupling of the gyro scale factor errors and the axis misalignment errors with the IMU rotation will be analyzed.
When projected in the body frame, the IMU rotation rates for the rotation sequences (1)–(4) can be expressed as follows:

The IMU rotation rates for the rotation sequences (5)–(8) can be easily obtained by adding a minus sign in front of ω in (16). Insert (16) and (13) into (11), and the misalignment angle of the 'mathematical platform' can be computed as follows:

From (17), it can be observed that the 'mathematical platform' will accumulate an angle error of 8(Δ13 + Δ31) radians in each rotation cycle, which will introduce an unbounded navigation position error. This angle error arises from the coupling of the axis misalignment error of the gyros with the IMU rotation.
The angle error shown in (17) will finally form an equivalent gyro drift that cannot be compensated as

where T = 8(TR + TS) represents a rotation cycle. Given that the axis misalignment error of the optical gyros is 2 arcsec, the values of Δ13 and Δ31 can be computed to be at the scale of 10 ppm. If the rotation cycle is 10 min, it can be computed from (18) that the equivalent gyro drift is 0.055 deg h−1, which will cause a very large navigation error in the long run. So the conventional 8-position rotation scheme cannot be used in the rotational INS based on optical gyros. In the following section, an improved 8-position rotation scheme and a novel 16-position rotation scheme will be proposed for the rotational INS based on optical gyros.
4. Design of a reasonable multi-axis rotation scheme
4.1. An improved 8-position rotation scheme
In the conventional 8-position rotation scheme shown in figure 1, the rotation sequences (1)–(4) and the rotation sequences (5)–(8) produce two misalignment angles that are equal, which causes the accumulation of the misalignment angles with time. So, if we change the rotation sequences (5)–(8) to make the corresponding misalignment angle opposite to that produced in the rotation sequences (1)–(4), the accumulation of the misalignment angles will be avoided.
From figure 1, it can be found that the rotation sequences (1)–(4) and the rotation sequences (5)–(8) have the same rotation path:

If we reverse the rotation path of the rotation sequences (5)–(8), a new rotation path can be obtained:

Combine the original rotation sequences (1)–(4) with the new rotation sequences (5)–(8) to form a new rotation path, and a novel 8-position rotation scheme can be obtained as shown in figure 2.

Figure 2. The improved 8-position rotation scheme.
Download figure:
Standard imageFollowing the same procedure of deriving (17) in section 3, the misalignment angle caused by the gyro scale factor errors and the axis misalignment errors within a rotation cycle in this improved 8-position rotation scheme can be obtained as follows:

Equation (19) shows that the novel 8-position rotation scheme will avoid the accumulation of the misalignment angle, and, as a result, avoid the accumulation of the navigation error. At the same time, similar to the derivation of (15), it can also be derived that this novel 8-position rotation scheme can also cancel the drifts of the inertial sensors.
According to the above analysis, this improved 8-position rotation scheme has two benefits: (1) it can remove all the drifts of the inertial sensors, and (2) the rotation process itself will not introduce additional error accumulation. So this proposed 8-position rotation scheme is a more suitable scheme for the rotational optical gyro INS, which will be verified by the simulation results in section 5.
4.2. A novel 16-position rotation scheme
To make further analysis, the following definitions and assumptions are made: (1) define the gyros initially coinciding with East axis, North axis and Up axis to be No. 1, No. 2 and No. 3 gyros, respectively, and (2) ignore the Earth's rotation and the body frame rotation with respect to the navigation frame.
According to figure 2, the input angular rate to the No. 1 gyro is ω during the rotation sequences (1), (3), (6) and (8), and is zero at any other time. So it can be easily concluded that the scale factor errors of the gyros cannot be completely compensated if they are asymmetric for the positive and the negative rotation. Obviously, the improved 8-position rotation scheme discussed in the previous subsection cannot compensate the scale factor asymmetric errors of the gyros.
This problem might be solved by changing the rotation order of the improved 8-position rotation scheme, which, however, may introduce some other error sources having larger influences. For example, by changing the rotation directions of the rotation sequences (2), (3), (6) and (7) in figure 2, the scale factor asymmetric errors can be completely compensated. However, the symmetric scale factor errors of No. 1 and No. 3 gyros will produce two equivalent gyro drifts, respectively, similar to that shown in (18), and they will cause more serious navigation errors.
After careful examination, new rotation sequences can be obtained by changing all the rotation directions in figure 2, and if those new rotation sequences are combined with the original ones shown in figure 2, a novel 16-position rotation scheme can be obtained, which is shown in figure 3. In this novel 16-position rotation scheme, the No.1 gyro and the No. 3 gyro will sense opposite angular rates in the first eight rotation sequences and the second eight rotation sequences, respectively, so the scale factor asymmetric errors can be naturally canceled in a whole rotation cycle.

Figure 3. A novel 16-position rotation scheme.
Download figure:
Standard imageFor the 16-position rotation scheme shown in figure 3, any rotation sequences with the same start position and end position are equivalent, because the rotation start position and the rotation end position will not affect the error compensation in a rotation cycle.
From figure 3, it can be found that the proposed 16-position rotation scheme is composed of two inverse 8-position rotation schemes shown in figure 2, so it inherits the merits of the improved 8-position rotation scheme and avoids its defects. Furthermore, it can also be found that when rotation axes have slight deviation from orthogonality or the rotation angles are imprecise, the proposed 16-position rotation scheme will have a better performance than the improved 8-position rotation scheme. So this 16-position rotation scheme is a more reasonable scheme for the rotational INS.
When applying the 16-position rotation scheme to the kinematic system, if the rotation of the IMU is relative to its carrier body, equation (16) will have large errors which will affect the compensation effects of the drifts and the axis misalignment errors of the inertial sensors. To achieve the best compensation performances, the rotation of the IMU should be as much as possibly relative to the inertial space. Obviously, two-axis rotation schemes can only isolate the angular movement in two directions, so to isolate all the body movements, three axes should be mounted in the system. To rigorously rotate the IMU relative to the inertial space, four axes should be mounted in the system. However, along with the increase of the axis numbers, the volume and cost of the system will also increase, so the axis numbers in practical applications should be compromised with other factors.
The two-axis rotation scheme can only approximately guarantee the rotation of the IMU relative to the geographical frame, namely including the Earth's rotation rate into  in (16). Then, according to (9), (10) and (11), the misalignment angle of the 'mathematical platform' can be expressed as
in (16). Then, according to (9), (10) and (11), the misalignment angle of the 'mathematical platform' can be expressed as

The first term on the right-hand side of (20) comes from the coupling of the scale factor errors and the axis misalignment errors with the rotation rate,  , and according to the discussions in previous sections, this term will not cause large long-term navigation errors in the 16-position rotation scheme, so equation (20) can be rewritten as
, and according to the discussions in previous sections, this term will not cause large long-term navigation errors in the 16-position rotation scheme, so equation (20) can be rewritten as

From (21), it can be noted that the misalignment angle of the 'mathematical platform' is caused by the coupling of the scale factor errors and the axis misalignment errors with the Earth's rotation rate. Substitute the attitude matrixes of the 16-position rotation scheme into (21), and the equivalent drift rate of the 'mathematical platform' can be approximated as follows:

From the above analysis, it can be noted that the dual-axis rotational INS can only approximately guarantee the rotation of the IMU relative to the geographical frame which has a constant rotation rate relative to the inertial frame, so certain navigation errors, which are equivalent to those caused by the drifts shown in (22), will be introduced through the coupling of the scale factor errors and the axis misalignment errors of the inertial sensors with the Earth's rotation rate. So, for the dual-axis rotational INS, although the 16-position rotation scheme is utilized, the accuracy and stability of the scale factors and the assembly of the inertial sensors should also be guaranteed to obtain long-term high navigation accuracy.
5. Simulation analysis and comparison of various rotation schemes
To verify the superiority of the 16-position rotation scheme, several rotation schemes for the rotational INS are simulated and compared with each other and also with the simulation results of the strapdown INS. The simulation is carried out with the following conditions: (1) the simulation position is located at latitude 28.2°, (2) the rotation angular rate is 12 deg s−1 and (3) the stop time at positions A, B, C and D is 30 s. The simulation results are shown in figures 4–12, where δλ and δL represent the longitude and latitude errors, respectively, and the unit of the errors is arcminute (').

Figure 4. Navigation errors introduced by the gyro drifts for the strapdown INS.
Download figure:
Standard image
Figure 5. Navigation errors introduced by the gyro drifts for the rotational INS with a simple dual-axis rotation scheme.
Download figure:
Standard image
Figure 6. Navigation errors introduced by the gyro drifts for the rotational INS with the proposed 16-position rotation scheme.
Download figure:
Standard image
Figure 7. Navigation errors introduced by the axis misalignment errors of gyros for the strapdown INS.
Download figure:
Standard image
Figure 8. Navigation errors introduced by the axis misalignment errors of gyros for the rotational INS with the conventional 8-position rotation scheme.
Download figure:
Standard image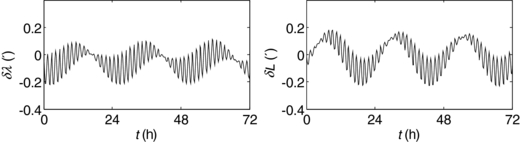
Figure 9. Navigation errors introduced by the axis misalignment errors of gyros for the rotational INS with the proposed 16-position rotation scheme.
Download figure:
Standard image
Figure 10. Navigation errors introduced by the scale factor asymmetric errors for the strapdown INS.
Download figure:
Standard image
Figure 11. Navigation errors introduced by the scale factor asymmetric errors for the rotational INS with the conventional 8-position rotation scheme.
Download figure:
Standard image
Figure 12. Navigation errors introduced by the scale factor asymmetric errors for the rotational INS with the proposed 16-position rotation scheme.
Download figure:
Standard imageFigures 4–6 show the longitude and latitude errors introduced by the drifts of the gyros for the strapdown INS, the rotational INS with a simple dual-axis rotation scheme and the rotational INS with the proposed 16-position rotation scheme, respectively. The drifts of the gyros are all set to be 0.01 deg h−1. The simple dual-axis rotation scheme in figure 5 is formed by extracting the rotation sequences (1), (2), (11), (12), (5), (6), (15) and (16) from the 16-position rotation scheme shown in figure 3. Figure 5 illustrates that an at-will-constructed rotation scheme will suffer from the problem of being unable to remove all the drifts of the inertial sensors.
From figure 4, it can be noted that the navigation errors caused by the gyro drifts are very large, and, especially, the longitude error has reached 58 arcmin in 72 h, for the strapdown INS. In figure 5, the gyro drifts when the IMU stops at positions A, B, C and D are completely removed, however, the gyro drifts during the IMU rotation can only be partially removed, so the navigation errors are still divergent and the longitude error is 2 arcmin in 72 h. In figure 6, no matter whether the IMU is stationary or rotational, the gyro drifts can be completely canceled, so very high navigation accuracy has been achieved and the longitude error is no larger than 0.01 arcmin. Furthermore, if only the gyro drifts exist, the navigation errors are similar in figure 6 for both the conventional and the improved 8-positon rotation schemes.
Figures 7–9 show the longitude and latitude errors introduced by the axis misalignment errors of the gyros for the strapdown INS, the rotational INS with the conventional 8-position rotation scheme and the rotational INS with the proposed 16-position rotation scheme, respectively. The axis misalignment matrix of the gyros is set as follows:

where the unit for the elements of the axis misalignment matrix is radian.
In figure 7, the axis misalignment errors of the gyros are coupled with the Earth's rotation for the stationary strapdown INS, so the longitude error will be divergent with time. In figure 8, the conventional 8-position rotation scheme is utilized to rotate the IMU, so a very large and divergent navigation error is introduced by the coupling of the axis misalignment of the gyros with the Earth's rotation. In figure 9, the 16-position rotation scheme can be used to automatically compensate the axis misalignment errors of the gyros under certain conditions, so the axis misalignment errors of the gyros only cause minor oscillations in the longitude and latitude error plots.
Figures 10–12 show the longitude and latitude errors introduced by the scale factor asymmetric errors for the strapdown INS, the rotational INS with the improved 8-position rotation scheme and the rotational INS with the proposed 16-position rotation scheme, respectively. All the asymmetric errors of the gyros axis misalignment are set to be 1 ppm.
From figures 10 and 11, it can be noted that the longitude and latitude errors introduced by the scale factor asymmetric errors are divergent for the strapdown INS and the rotational INS with the improved 8-position rotation scheme, while the longitude and latitude errors introduced by the scale factor asymmetric errors are oscillatory with minor magnitude for the rotational INS with the proposed 16-position rotation scheme.
6. Concluding remarks
Through the analysis of the rotation schemes for the rotational INS, it has been pointed that the conventional 8-position rotation scheme cannot be directly utilized for the IMU rotation of the optical gyro-based rotational INS, because although this conventional rotation scheme can compensate all the gyro drifts in a rotation cycle, the coupling of the gyros axis misalignment errors with the Earth's rotation will introduce very large navigation errors. So an improved 8-position rotation scheme and a novel 16-position rotation scheme have been proposed. The 16-position rotation scheme can compensate all the gyro drifts no matter whether the IMU is stationary or rotational, and will not introduce additional system error accumulations.
Analysis and simulation results have indicated that, apart from the drifts of the inertial sensors, the 16-positon rotation scheme can also remove the scale factor asymmetric errors of the optical gyros, and if the rotational INS has three or four rotation axes, the 16-position rotation scheme can be used to control the IMU to rotate with respect to the inertial frame, and then the scale factor errors and the axis misalignment errors of the optical gyros can also be completely compensated. If the rotational INS has only two rotation axes, the 16-position rotation scheme can only be used to control the IMU to rotate with respect to the geographical frame, and then the scale factor errors and the axis misalignment errors of the optical gyros may couple with the Earth's rotation, which will cause certain long-term navigation errors. It can also be noted that, for the rotational INS having only two rotation axes, the axis misalignment error has the largest impact on the navigation position, while the gyro drift and scale-factor asymmetry can be neglected due to their new 16-rotation scheme.
This paper discussed the multi-axis rotation scheme for the optical gyro INS, which can be used in marine navigation for long-time application. Besides, the rotation scheme discussed in this paper can also be used in the micro-electromechanical (MEMS) gyro INS by making proper amendment to achieve moderate navigation accuracy with low-cost sensors.