

Abstract
Wind energy is one of the most important renewable energy sources and many countries are predicted to increase wind energy portion of their whole national energy supply to about twenty percent in the next decade. One potential obstacle in the use of wind turbines to harvest wind energy is the maintenance of the wind turbine blades. The blades are a crucial and costly part of a wind turbine and over their service life can suffer from factors such as material degradation and fatigue, which can limit their effectiveness and safety. Thus, the ability to detect damage in wind turbine blades is of great significance for planning maintenance and continued operation of the wind turbine. This paper presents a review of recent research and development in the field of damage detection for wind turbine blades. Specifically, this paper reviews frequently employed sensors including fiber optic and piezoelectric sensors, and four promising damage detection methods, namely, transmittance function, wave propagation, impedance and vibration based methods. As a note towards the future development trend for wind turbine sensing systems, the necessity for wireless sensing and energy harvesting is briefly presented. Finally, existing problems and promising research efforts for online damage detection of turbine blades are discussed.
Export citation and abstract BibTeX RIS
1. Introduction
With persistent population and economic growth worldwide, the consumption of energy, mostly fossil energy, has also increased rapidly to keep up with the improvement of living conditions. However, as fossil energy is rather limited, many countries are turning their attention towards renewable energy resources, for instance, solar, geothermal, wind and tidal wave energy. Among these different types of renewable energy sources, wind energy is the most attractive and many governments are beginning to rely more on wind power. For instance, the USA has recently released a plan to generate 20% of the country's electricity from wind power by 2030. Another large energy consumer, China, seeks to have 100 GW of wind energy capacity by 2020 and has recently already led the world as the country with the most installed wind-capacity (Joselin et al 2007, Council G W E 2011). Moreover, many countries in the European Union have set similar targets as that of the USA. As an evidence of the faith in wind energy, figure 1 shows the annually installed wind energy capacity from 1996 to 2013 around the globe. In 1996, there was only 1 280 MW of wind energy generating capacity installed. However, this number increased to 35 289 MW in 2013, which is thirty times more than the capacity 17 years ago. Cumulatively, this amounted to about 318 105 MW around the world in 2013 (Anuual Market Update 2013). In the USA alone, 60 078 MW of installed wind capacity was available as of 2013 (Installed Wind Capacity 2014).

Figure 1. Global annual installed wind energy capacity 1996–2013(Anuual Market Update 2013).
Download figure:
Standard image High-resolution imageFurthermore, the usage of wind energy is not expected to decrease within the next decade (García Márquez et al 2012). Market research forecast instead that such increase in usage will be constant and steady (Council G W E 2011). In figure 2, the green bars represent wind energy capacity from 2011 to 2016 to be annually installed, which is a continuation of the trend in figure 1 (albeit in a different scale); the light blue bar indicates cumulative wind energy capacity to be installed around the world; the red line is annual installed capacity growth rate and the dark green line indicates the trend of cumulative capacity growth rate.

Figure 2. Market forecast on the wind energy 2014–2018 (Anuual Market Update 2013).
Download figure:
Standard image High-resolution imageAs observed in figure 2, the total installed wind energy capacity in 2018 will be around 593.3 GW. A typical wind turbine currently being built usually has a name-plate capacity of 2 MW (Hau 2005). Therefore, approximately 300 000 wind turbines will be in operation by 2018. Conventionally, wind turbines are routinely checked for safety considerations. Considering the fact that the height of a wind turbine increases in correlation with blade size (currently around 120 m in average), and the locations of wind turbines are usually at remote mountainous or rough sea regions, the routine maintenance of these turbines becomes a demanding task and wind turbine stakeholders have begun to realize that damage detection maybe an effective means to ensure safe and continuous operation of wind turbines. Damage detection involves the use of local or global methods to judge whether damage is present in a structure, to locate where the damage is and to further determine the degree of damage (Farrar et al 2001). From another perspective, damage detection is an essential part of a structural health monitoring (SHM) system. As defined in Li et al (2004), SHM refers to the use of in situ, continuous or regular (routine) measurement and analyses of key structural and environmental parameters under operating conditions for the purpose of providing early warnings about abnormal states or accidents in order to avoid casualties, as well as providing advice for maintenance and rehabilitation requirements. This definition by Li et al emphasizes the significance of the advance damage alert ability of SHM systems, and for this purpose, accurate damage detection plays a critical role.
Damage can be counted as changes to the material and/or geometric properties of a structure, including variations to the boundary conditions and structural connectivity, which can adversely affect designed structural functions and performance (Farrar and Worden 2007). From the perspective of a turbine owner (Schulz and Sundaresan 2006), the advantages of applying damage detection or SHM techniques include but are not limited to:
- (1)minimized expensive labor costs for routine inspection of turbines, which are not always easy to access,
- (2)prevention of unnecessary replacement of components based on time of use and performance,
- (3)minimized down time and reduced frequency of sudden breakdowns,
- (4)improved reliability of power generation while preventing overload of the turbine,
- (5)allow repairs rather than replacement of blades by detecting damage in advance,
- (6)uncovering of design weaknesses before failure,
- (7)protection of investments in wind power by residential owners, utility companies, and public facilities such as schools that are trying to reduce energy costs,
- (8)use of lighter advanced blades made from fiberglass and graphite that will allow the large turbines to react to wind changes more efficiently, and thus capture more wind energy.
The current trend in wind turbine blade design is towards complex blade shapes to improve aerodynamic efficiency and composite materials for high turbine performance, since larger sized blades are more efficient in improving energy harvesting capability, which is directly proportional to the swept area and the diameter of the blade (Hau 2005). To improve strength and reduce weight, fiberglass graphite and balsa wood materials have been adopted. Use of advanced blade geometry and material demand the installation of SHM or damage detection systems on wind turbine blades in order to provide critical information about the initiation and propagation of potential blade damage. Moreover, as turbine blades account for 15–20% of the total turbine cost, it would be beneficial to maintenance related costs and time by monitoring any damage experienced by the blades (Farinholta et al 2012).
Sørensen et al (2002) analyzed the cost-benefit of embedding sensors for damage detection in large wind turbine blades. They compared the total operating costs of a three-bladed 2 MW offshore turbine with and without embedded sensors from an operator's point-of-view. The cost for three damage detection systems including sensors and devices, namely acoustic emission (AE) (260 000 Danish krone(DKK)), embedded fiber optics (135 000 DKK) and conventional acceleration sensors (102 000 DKK), were analyzed and was demonstrated that in addition to being able to provide early warnings for growing damage, it is economically attractive to embed sensors in the blade for damage.
Investigations also suggest that larger turbines fail more frequently and thus require more maintenance (García Márquez et al 2012). According to the wind turbine accident statistics (1975–2012) provided by the Caithness Windfarm Information Forum (CWIF 2012) as shown in table 1, the largest number of wind turbine accidents was due to blade failure (a total of 249 incidents). The damage of blades will do harm to the wind turbine through two ways: (1) imbalance will aggressively result in harm to the bearings, and even in the collapse of the tower, (2) turbulent air flow negatively affects neighboring wind turbines. Moreover, blade failure statistics shown in table 1 is by no means fully comprehensive and is believed to be only a portion of accidents. Indeed the Telegraph reported there had been 1500 wind turbine accident related incidents in the UK alone during the past five years (Malnick 2011). The number of incidents is nearly equivalent to one accident a day. However, the data collected by CWIF reports only 142 UK accidents from 2006 to 2010 and thus may only represent 9% of actual accidents. Many of such accidents involve fatal disasters with economic and social consequences (Butterfield et al 2009). It is therefore crucial to monitor potential damage in wind turbine blades to avoid or minimize accidents and simultaneously ensure better performance and efficiency (Amirat et al 2009).
Table 1. Blade failure statistics by year (1970–2012) (CWIF 2012).
| Year | ∼90s | 2000 | 01 | 02 | 03 | 04 | 05 | 06 | 07 | 08 | 09 | 10 | 11 | 2012a |
| No. | 35 | 4 | 6 | 15 | 13 | 15 | 12 | 16 | 22 | 20 | 26 | 20 | 19 | 26 |
In this review, the authors first present typical damage scenarios of wind turbine blades and briefly introduce traditional and recently developed sensors that are suitable for damage detection of turbine blades. Then, four highly influential damage detection methods, namely the transmittance function, wave propagation (WP)-, impedance (IMP)- and vibration (VIB)-based methods are comprehensively reviewed along with their applications. Finally, current issues that face the development of effective damage detection methods of turbine blades are discussed.
2. Damage scenarios of wind turbine blades
2.1. Causes of wind turbine blade failures
Under normal working conditions, wind turbine blades bear pulsating wind loads, which drive the blades rotation and subsequently the motors' rotor to generate electricity. After a prolonged period of time, turbine blades suffer from fatigue-induced degradation due to cycling loads, and cracks will initiate in the materials of the blade. Under the right conditions, the cracks will develop rapidly and lead to the failure of a wind turbine blade, or even the collapse of the whole wind turbine. In general, strong winds, lightning, ice throw or even collisions with birds are responsible for the damage and cracking of wind turbine blades (CWIF 2012).
2.1.1. Wind induced blade failures
Wind is the usual force that drives a wind turbine to operate; however, wind of large magnitudes have the potential to severely damage turbine blades. On the afternoon of 2 July 2009, a fierce storm destroyed portions of an industrial wind turbine located between Brieske and Schwarzheide in Germany. Pieces of the wind turbine flew 150 m through the air landing about 50 m from federal highway No. 169 (figure 3). The approximately 40 m blade destroyed several trees as it cut a track through the forest. The turbine model was a Vestas V80-2 MW with a height of 140 m (Windaction 2012).

Figure 3. Wind induced blade failure (Windaction 2012).
Download figure:
Standard image High-resolution imageOn 23 October 2008, a blade on one of four turbines had been found to break off at a small-scale wind farm southwest of Wyanet, Illinois. The blade was found in an adjacent cornfield 100–150 ft away from the wind turbine base. The blade is 140 ft long and 15 ft wide at their widest point as shown in figure 4(a). Similarly, a blade on a General Electric 1.5 MW wind turbine at the Wessington Springs Wind Farm as shown in figure 4(b) was shredded in high winds during 2009 (Windaction 2012).

Figure 4. (a) Blade break in Wyanet; (b) blade shredded due to high winds (Windaction 2012).
Download figure:
Standard image High-resolution image2.1.2. Blade failures due to lightning shock
Lightning shock is another main reason for turbine blade failure besides strong winds. For a turbine blade, lightning protection consists of several exterior copper 'receptor' air termination disks, which are fastened to interior aluminum conductors running the length of the blade. Lightning strikes on wind turbine blades create a destructive internal shock wave from air or moisture expansion, or both, within turbine blades. The extreme lightning temperatures can force interior moisture to transit into an expansive state (steam). In turn, the exceeding levels of pressure overstresses the blade to subsequent failure sometimes despite the use of lightning protection systems. On May 2008, a lighting event occurred at a farm in south central Texas (Windaction 2012). Figure 5(a) shows the picture from a video when the light struck the turbine blade. The damage done to the blade due to the lightning strike is shown in figure 5(b). Figures 5(c) and (d) show characteristic lighting signature to the blade tip and internal spars and lighting conductors inside the blade, respectively.

Figure 5. (a) Lightning strike on a turbine blade; (b) blade damage from lightning strike; (c) characteristic lightning strike on blade tip; (d) damaged blade showing internal spars and lightning conductors (Windaction 2012).
Download figure:
Standard image High-resolution image2.1.3. Blade failures because of uneven ice accumulation
Ice build-up on the surface of wind turbine blades are another major source of safety and operational concerns due to the high speeds (in excess of 180 mph at the tips) of the blades. The large centrifugal force from the blade rotation can be enough to dislodge and launch accumulated ice off from the blades at great speeds. Figure 6 shows a two inch thick ice accumulation on a blade surface and its subsequent projection from a blade (Windaction 2012). Additionally, ice may build up unequally among three blades and cause unbalanced rotation. Unbalanced rotating can stress the hub unnecessarily and when certain conditions are met, localization will occur in one of the blade as will be discussed in section 5. Once mode localization occurs, one blade will vibrate with amplitude much larger than others and can result in catastrophic failure.

Figure 6. Ice accumulation and falling off on a wind turbine at Wachusett Wind Power (Windaction 2012).
Download figure:
Standard image High-resolution image2.1.4. Blade failures due to faulty manufacturing
While factors from the environment and human interference are common causes of wind turbine blade failures, faulty manufacturing can also lead to unexpected failures. Figure 7 shows two instances of blade failure due to faulty manufacturing. For example, in figure 7(b), a turbine blade in Ohio shattered due to a wrinkle in the carbon fiber that was used to build the spar of the blade. As the blade experienced several cycles of high wind loads, the wrinkle propagated and eventually was severe enough to lead to structural failure (Gebert 2012).

Figure 7. (a) A broken 66.5 m turbine blade in 2008 at Kirkheaton (Connellan 2008); (b) two blades shattered with wreckage far scattered in Ohio on 25 April 2012 (Martin and Trent 2012).
Download figure:
Standard image High-resolution image2.2. Types of blade damages
As can be seen, a multitude of factors can contribute to the failure of the wind turbine blade. Studies have also been carried out to understand the types and characteristics of the damage that can be sustained by wind turine blades. In the testing and post failure analysis of a 25 m wind turbine blade Sørensen et al 2002 were able to identify and categorize seven different types of damage that may occur to the wind turbine blades during operation. These seven types of blade damage are indicated in figures 8(a)–(d) as (1) skin/adhesive debonding, (2) adhesive joint failure, (3) sandwich debonding, (4) delamination, (5) splitting along fibers, (6) buckling induced skin/adhesive debonding (special case of type 1) and (7) cracks in gelcoat. Several typical types of damages are shown in figure 8(b).

Figure 8. Types of damage that may be sustained by a wind turbine blade (downwind skin (a), main spar inner (b) and outer (c) surfaces); (d) example photo of certain types of damage on a wind turbine blade surface (note: number 7 represent cracks in the gelcoat and number 5 represent splitting along fibers) (Sørensen et al 2004).
Download figure:
Standard image High-resolution image2.3. Blade areas prone to damages
Ciang et al (2008) summarized that the following four typical areas of a blade are easily damaged:
- (a)30–35% and 70% in chord length from the blade root,
- (b)the root of the blade,
- (c)maximum chord and,
- (d)upper spar cap/flange of the spar.
Although many investigations have shown that the locations at 30–35% and 70% of the blade length from the root section are more prone to damage as shown in figure 7, by both simulation and experimental methods (Sundaresan et al 2002, Shokrieh and Rafiee 2006, Ciang et al 2008), TX-100 blade fatigue tests unexpectedly demonstrate that a multitude of cracks developed near the trailing edge on the high-pressure side (Rumsey and Paquette 2008). During a quasi-static proof test of a 9 m long wind turbine blade at the National Renewable Energy Laboratory, damage in two locations were discovered (Kirikera et al 2008). One damage location occurred on the trailing edge while the other occurred on the leading edge. Both locations were on the low-pressure side. The blade was cut open to determine the cause of failure and it was found that the primary reason was panel buckling (van Dam and Hughes 2006). Studies have shown, however, that damage is sustained in different regions of the blade during static tests compared to fatigue tests (Rumsey and Paquette 2008), and in both cases deviate much from damage sustained during in-service operation. Detailed accounts for various blade failures could be found in (CWIF 2012).
Therefore, without the assistance of damage detecting instrumentation, there will be difficulty in predicting where damage will occur for an in-service rotating blade. While Ciang et al listed the most common places for damage to occur, the exact locations will still depend on the complete loading history and specific configuration of the blade. Furthermore, the existence of local mode VIBs complicates such predictions as to be discussed in section 5.
3. Sensors used for damage detection of turbine blades: their principles and applications
Traditionally, electrical strain gauges are used for measuring the stress distribution of certain blade regions and accelerometers for measuring the dynamic responses and the modal analysis of a whole blade. Technical advances allow newly emerging sensors, for instance, optical fiber sensors and lead zirconate titanates (PZTs), to measure other inherent properties of a turbine blade for damage detection. In this section, these sensors are briefly introduced with their operating principles and applications for blade damage detection.
3.1. Conventional strain-gauges
Conventional strain-gauges are widely used and easily recognizable. Typically, they consist of a metal foil pattern bonded onto a flexible nonconductive support. The support carrying the metal foil is then bonded to the monitored structure, usually through cyanoacrylate. Strains in the structure is transferred to the metal foil and causes a change in electrical resistivity of the metal foil. The change in resistivity is measured by a locally connected data acquisition system, commonly through the use of a Wheatstone bridge.
Static and fatigue tests are routinely conducted as part of the certification process for wind turbine blades. The standard procedure is to monitor the blade with strain gauges during a static test to extreme loads and subsequently during an accelerated fatigue test (Commission I E 1999). These tests are designed to ensure that all parts of the blade can withstand extreme load cases as defined in the wind turbine design and testing standards (Kong et al 2006). Rumsey and Paquette installed thirty 1000 Ω metal foil strain gages on the gel-coat surface of a test blade and the strain gages were zeroed at the flapwise tare load (Rumsey and Paquette 2008). Sutherland et al placed fourteen strain gauges at four spanwise locations on the high pressure side of the blade to monitor its strain distribution (Sutherland et al 1994). More than a hundred strain gauges, which were mostly three element rectangular rosettes with 1000 Ω elements, were mounted on a full scale blade with a length of 25 m to measure the axial strain (Jørgensen et al 2004).
The disadvantages of conventional strain gauges are that they are prone to failures on the long term, even when installed in the root of the blade. The copper wiring also makes them sensitive to severe electrical disturbances, such as lightning strikes. Moreover, conventional strain gauges suffer heavily from ambient noise disturbances and are not sensitive enough to indicate certain types of blade damage. For instance, in one study strain gauges on a blade did not provide a clear indication of damage until the skin buckled (Schulz and Sundaresan 2006).
3.2. Optical fiber sensors
Contrary to conventional strain gauges, optical fiber sensors are not sensitive to electrical and magnetic interference and are intrinsically immune to the effects of lightning strikes, which occur quite frequently to turbine blades. They are also considered to be accurate, reliable and stable in addition to their multiplexing ability and ease of embedment into structures (Li et al 2004). The principle of optical fiber sensors is rather simple. Geometric (size and shape) and optical (refractive index and mode conversion) changes of optical fibers due to various environmental perturbations can be converted or encoded into corresponding changes in the optical properties of the transmitted light, such as amplitude (intensity), phase, frequency, wavelength and polarization. With the appropriate demodulation systems, the coded light signal can be employed to measure external environment parameters, such as strain, temperature, moisture, corrosion and acceleration along the fiber. Fiber optical sensors can be categorized into many types according to measured physical parameters and their operating principles. Currently, two kinds of fiber optic sensors, namely the fiber Bragg grating (FBG) sensor and optic fiber micro-bend displacement sensor, have been applied in damage detection of turbine blades.
FBG sensors are created by etching a small section of periodically changing refractive index (each peak in refractive index change is a Bragg grating on the fiber core using a laser interference pattern or phase mask. Each Bragg grating partially reflects light backwards towards the source, and together, based on the periodic distance between gratings, a small, wavelength-specific band of the transmitted light spectrum is reflected (figure 9).

Figure 9. Operational principle of FBGs. The refractive index of gratings (ng) is different from that of the core (nc), and are separated periodically at distance Λ. Wavelengths at λb are reflected.
Download figure:
Standard image High-resolution imageThrough the interrogation of changes in wavelength of the reflected light, local strain or temperature changes that alter the index of fiber core refraction and the grating period can be measured (Udd 1996). During the past decade, FBG sensors have been used in progressively wide areas of applications, including monitoring systems for other types of civil infrastructure (Moyo et al 2005, Chan et al 2006, Leng et al 2006, Majumbder et al 2008, Ho et al 2013). Due to the inherent advantages of fiber optic sensors, FBGs have also made their way into new and developing monitoring systems for wind turbines. Rademakers et al (2004) multiplexed FBG sensors across nine optical lines (four to eight sensors each line) to monitor strain with temperature compensation (figure 10).

Figure 10. (a) Positioning of FBG sensors near the root of a wind turbine blade; (b) multichanneled FBG interrogator (Rademakers et al 2004).
Download figure:
Standard image High-resolution imageThe sensor configuration as well as the instrumentation had been installed in a turbine and were applied for measurements during a one year period. Measured data demonstrated that FBG sensors were sufficient for measuring fatigue loads. Guo et al (2007) collected data from a FBG sensor network on a turbine blade by a signal processing unit and transmitted them to a remote computer in the stator via a class I Bluetooth wireless RS232 interface and Wi-Fi technique. Park et al applied surface-laminated FBGs for the study of the different operating conditions of 42.65 m long wind turbine blades of a 2 MW wind turbine. The VIB modes of the different conditions (yaw, pitch, startup, normal conditions) were measured using the FBG strain sensors and compared to finite element models of the blades (Park et al 2011) (figure 11).

Figure 11. (a) Various positioning of FBG sensors along the blades of a wind turbine; (b) positioning of FBGs within a wind turbine blade (Park et al 2011).
Download figure:
Standard image High-resolution imageRecently, Bang et al demonstrated the application of FBG sensors for the monitoring of both onshore and offshore wind turbines. Using 41 FBG sensors and custom developed FBG interrogator unit able to achieve over 40 kHz sampling rate, the dynamic strains of a 1.5 MW onshore wind turbine and a 2 MW offshore wind turbine were measured stably over four weeks (Bang et al 2011). While the technique as used to monitor the stem of the wind turbine, conceivable, the technique can also be applied to wind turbine blades. Further examples of FBG-based monitoring of wind turbines and their blades are discussed in (Huang et al 2010).
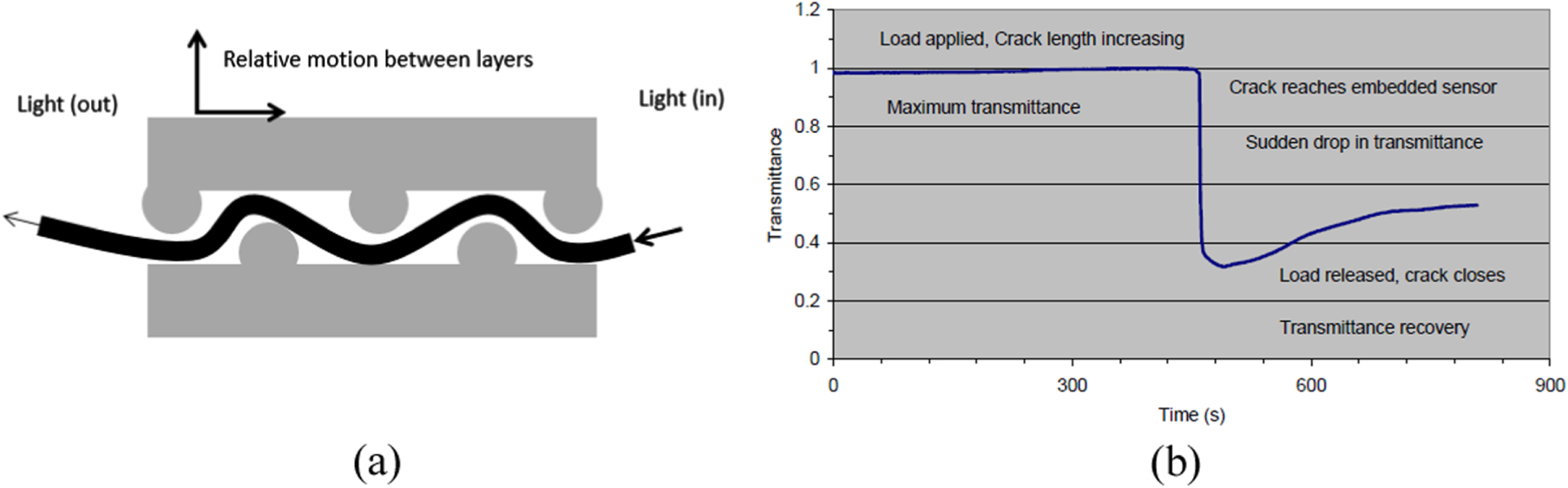
Another kind of optical fiber sensor, utilizing microbending effects, were also developed for the detection of cracks in adhesive joints of blades (Sørensen et al 2002). The microbending optical fiber sensor utilizes the fact that the propagation of light through an optical fiber may be strongly affected by bending the fiber. When two solid corrugated parts adhered to the fiber are moved to or from each other the curvature of the fiber changes (Lau 2003). This affects the intensity of the light transmitted through the fiber. The optic fiber micro-bend displacement transducer is shown to be capable of determining cracks in adhesive joints during full scale LM 19.1 blade tests (figure 12(b)).

Figure 12. (a) Operational principle of microbend fiber optic sensor; (b) intensity change of transmitted light in microbending fiber optic sensor due to crack in LM 19.1 blade (Sørensen et al 2002).
Download figure:
Standard image High-resolution imageAlthough the potentials of optical fiber sensors are certainly not yet fully demonstrated in wind turbine applications, they, especially FBG sensors, offer great prospects as substitutes or alternatives to conventional strain gauges for long term damage detection. Most optical fiber sensors require expensive and bulky interrogation equipment, which may be an obstacle preventing them from having widespread field applications in wind turbine blade monitoring.
3.3. Accelerometers
An accelerometer usually behaves as a damped mass on a spring, and measures acceleration of the object on which they are attached to based on classical Newton's mechanics. When the object experiences an acceleration, a force develops within the spring which displaces the mass, resulting in a second order lumped physical system. Under certain damping condition and frequency range, the mass acceleration is almost directly proportional to object acceleration amplitude (Clough and Penzien 1995). In commercial devices, piezoelectric, piezoresistive and capacitive components are then used to convert the mechanical acceleration into an electrical signal and the object acceleration is then proportionally measured.
Accelerometers are conventional sensors used to measure structural responses in dynamics testing or modal analysis. Most researchers are familiar with accelerometers and they are included here only for completeness. Usually, highly sensitive tri-axial accelerometers, low-frequency capacitive accelerometers are used for acceleration measurement.
Rumsey (Rumsey and Paquette 2008) deployed eight PCB triaxial accelerometers (four PCB 3711D1FA20G and four PCB 3711D1FA50G) on a TX-100 blade for modal analysis in the flap-wise direction. Prowell et al attached eight accelerometers along a full scale 6.5 MW turbine blade (16 m diameter turbine) and oriented to measure for flap and edge bending (Prowell and Veers 2009, Prowell et al 2009) during shaking table tests. Mode shapes of the turbine were identified and its responses to various recorded earthquake excitations were evaluated (Prowell and Veers 2009). Recently, Häckell and Rolfes (Häckell and Rolfes 2013) presented automatic modal identification studies on tripod-based turbines in alpha ventus (AREVAM5000 plant AV07) with 24 accelerometers at six different levels. The hub height was 118 m and the different sensor levels were at 26, 61.1, 71.2, 82.25, 96.5 and 110 m above the seabed. In total, data over a period of 17 months was used. It is noteworthy that accelerometers are usually used for VIB-based global damage detection methods (Rolfes), as to be presented in section 4.4.
3.4. AE Sensors
AE sensors are typically composed of piezoelectric crystals and characterized by high bandwidth. The piezoelectric crystal is able to convert mechanical stress energy into electrical signals of the same frequency. In relation to SHM of wind turbine blades, high frequency transient stress waves are often the byproduct of certain types of damage experienced by the blade (figure 13). The principle of AE sensors is to detect these transient stress waves by means of piezoelectric crystals and subsequently to interpret them in terms of damage occurring in the material of a blade (Dutton 2004). Modern AE acquisition systems usually include A/D converters and feature extraction circuitry so that they can receive and analyze a very large number of events per second, enabling many sources to be captured and investigated.

Figure 13. (a) Schematic of AE sensor (Vallen 2002); (b) photo of AE sensor (MISTRAS Group Inc. 2010); (c) working principle of AE sensors sensor (MISTRAS Group Inc. 2010).
Download figure:
Standard image High-resolution imageAE sensors are specifically suitable for monitoring localized sound waves that propagate on the blade surface. These sound waves are mainly caused by blade damage such as fiber breakage, delamination, cracking, deformation, debonding, impacts, crushing and others. For the AEGIS blade tests, AE sensors, PAC-R6 with resonant frequency of 60 KHz and PAC-R15 with resonant frequency of 150 KHz, were used (Dutton 2004). In another application, Rumsey and Paquette attached twenty-four PAC-R6I AE sensors in the TX-100 blade tests (Rumsey and Paquette 2008).
The most important aspect of AE sensors, compared to other sensors, is that they do not require a secondary, artificial excitation from the use into the monitored structure. AE sensors will function just be passively listening to sound waves generated by the material changes. However, transient nature and rapid attenuation of AE require that AE sensors be deployed near the location in which material is damaged, which are not known a priori. In the case that damage is done near the sensor, data must be acquired with a high sampling rate. Furthermore, the high acoustic anisotropy and variability produced by diverse material characteristics, orientations and interfaces of the internal components of a blade render meaningful interpretation of AE signals difficult.
3.5. PZT Sensors
Piezoceramics are a well known type of material. Many accelerometers and AE sensors are made from piezoceramics. PZT, one of the world's most widely used type of piezoceramic materials, exhibits a unique range of properties. One interesting property used for blade damage detection is the PZT's strong piezoelectric effects. As shown in figure 14, when a PZT is deformed, an electric charge is generated. The opposite of this phenomenon also holds true and is known as the inverse piezoelectric effect. Unlike AE and other aforementioned sensors, PZTs can function both as sensors when it is subject to strain or stress (piezoelectric effect) or actuators when it is subject to an electric voltage (inverse piezoelectric).

Figure 14. Operational principle of PZT (compression mode with poling direction P, is shown). (a) Inputting of a charge (Vin) causes physical deformation (ΔT) of the PZT, while (b) inputting of a mechanical force Fin produces a measurable charge output (Vout) (Piezo Systems Inc. 2011).
Download figure:
Standard image High-resolution imageGhoshal et al used PZT both as actuators and sensors on damage detection of an 8 ft long section of a fiberglass wind turbine blade (Ghoshal et al 2000). Two actuator patches were located at the center length of the blade with one on each side, and four additional sensor patches were installed between the center patch and the side patches. In another application, Kirikera (Kirikera et al 2008) bonded twelve PZT sheets (15 mm length × 5 mm width × 0.3 mm) for a 9 m long wind turbine blade test. The PZT sheets worked together to form a structural neural system (SNS) in order to form an intelligent processing system for localizing damage. PZT is low cost and can be fabricated into ribbons or other different thin shapes besides square patches. Schulz and Sundaresan thus packed PZT ribbons as continuous sensors to detect minute AEs in blades (Schulz and Sundaresan 2006). Compared to other sensors, the advantages of PZT sensors include: (1) higher sensitivity to structural changes; (2) suitability for complex geometries and can be placed close to the potential damage areas; (3) can be conveniently molded to different shapes depending on the application; (4) low cost.
3.6. Macro-fiber composite (MFC) sensors
Developed in 1996 by the NASA Kennedy Space Center, MFCs are composed of piezoelectric fibers organized together in an epoxy matrix and interfaced with polyimide electrodes (Wilkie et al 2004) (figure 15).

Figure 15. (a) Photo of MFC actuator; (b) schematic of MFCs (Wilkie et al 2004).
Download figure:
Standard image High-resolution imageLike PZT sensors, MFC sensors can also be used both as actuators and sensors. During the TX-100 blade tests (Rumsey and Paquette 2008), one MFC actuator (3.375 × 2.25 in., model 8557-S1) was adhered to the high-pressure side of the blade whereas three MFC sensors (1.5 × 1 in., model 5–21) were installed on the low-pressure side for WP-based damage diagnosis. Moreover, MFC sensors can also be used for IMP-based damage detection as was discussed in section 4.3, for which six MFC self-sensing actuators (model M2814-P1) were mounted on the blade surface and an Agilent HP4192A IMP analyzer was adopted to interrogate the signals from both actuators and sensors (Pitchford et al 2007).
3.7. Scanning laser doppler vibrometer (SLDV) sensors
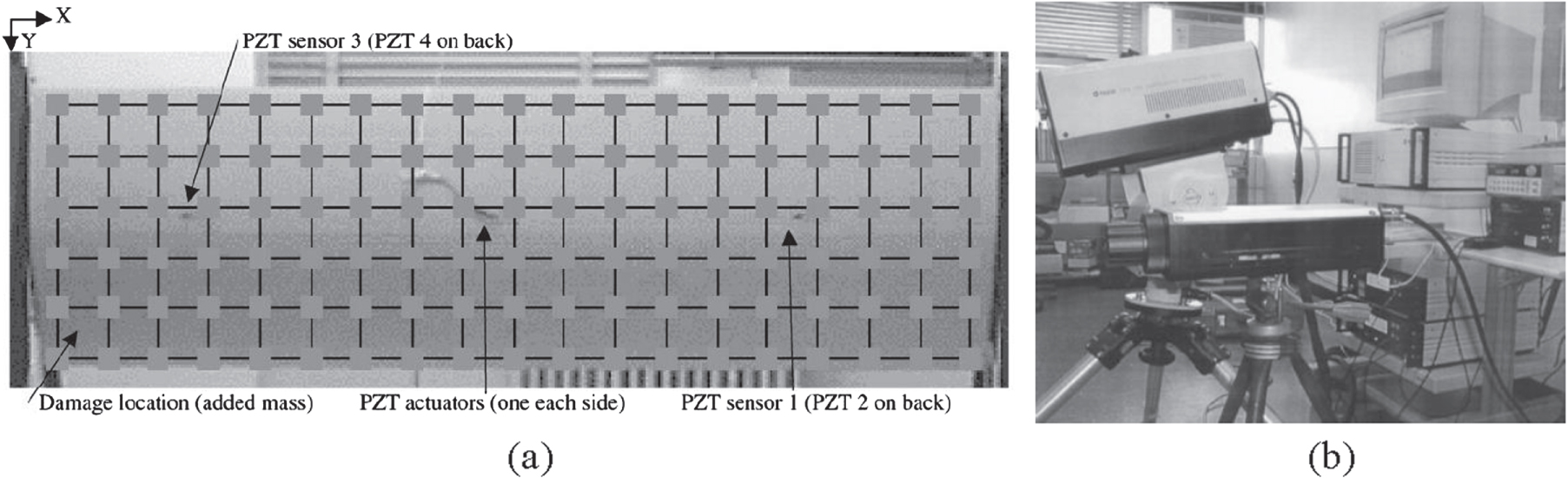
SLDV can measure the VIB of many points over a wide frequency range quickly without contacting the blade (Siringoringo and Fujino 2006). A laser beam from the SLDV is directed at the surface of a blade to allow noncontact measurements of VIBs through the Doppler effect. The Doppler effect refers to the relative frequency change between the source laser and reflected laser due to movements of the blade surface with respect to the laser source. An internal laser interferometer measures the frequency change by interfering the reflected laser and a reference laser. The resulting interference is observed by a photodetector in terms of variations in light intensity, with the frequency of variation correlated with the frequency of the Doppler shift. By analyzing the photodetector measurements, the VIB amplitude and frequency of the blade motion can be determined. In an 8 ft long section of a fiberglass wind turbine blade (Ghoshal et al 2000), the velocities at 114 points of the blade were used to compute operational deflection shapes and transmittance functions for damage detection. Retroreflective material was painted onto the bare fiberglass blade to improve the reflected laser signal intensity in the experiments (figure 16).

Figure 16. (a) Array of laser points overlaid on a wind turbine blade instrumented with several PZT sensors; (b) laser vibrometer used to measure the deflections of the blade (Ghoshal et al 2000).
Download figure:
Standard image High-resolution imageOzbek et al 2013 placed a total of 55 markers made of retro-reflective material on a Nordex N80 turbine (11 markers on each blade and 22 markers on the tower). The test 2.5 MW turbine with a rotor diameter and tower height of 80 m was located Wieringermeer, the Netherlands. Photogrammetry and laser interferometry were used to measure the dynamic response of the large test wind turbine.
One significant advantage of SLDV is its nonintrusive nature without mass-loading effects and can obtain operational deflection shapes or mode shapes of a turbine blade more accurately compared to conventional accelerometers.
3.8. Overview of sensors used in wind turbine blade monitoring
Several types of sensors have been presented in the previous sections. Each sensor type has its own particular set of advantages and disadvantages, as briefly summarized in table 2. As will be seen in the next section about damage detection methods, sensors are often used synergistically with each other to produce a more comprehensive picture of the structural health of wind turbine blades.
Table 2. .
| Sensor type | Advantages | Disadvantages |
|---|---|---|
| Strain gauge |
|
|
|
|
|
|
||
| Accelerometer |
|
|
|
|
|
| Acoustic emission |
|
|
|
|
|
|
|
|
| PZT/MFC |
|
|
|
|
|
|
|
|
|
||
|
||
|
||
| Optical fiber sensor |
|
|
|
|
|
|
|
|
|
||
|
||
| Scanning laser doppler vibrometer |
|
|
|
|
|
|
|
|
|
|
4. Review of damage detection methods for wind turbine blades
Many damage detection techniques and algorithms exist for wind turbine blades. Here we summarize with emphasis the most promising methods, which are listed in table 3 along with types of sensors used and sizes of blades experimented.
Table 3. Summary of sensors and methods for blade damage detection (1992–2012).
| Blade type | Ten 4.5 m blades | 9 m blade | 4.25 m AEGIS blade | 7.9 m blade | 8-foot section of a blade | 9 m TX-100 blade | 9 m LM blade | 9 m CX-100 blade |
|---|---|---|---|---|---|---|---|---|
| Sensors deployed | AE | SG 12 AEs | SG AE | SG AE | PZT SLDV | SG Acc PZT MFC | SG OFS Acc AE | Acc PZT MFC |
| Damage detection methods | AE | AE | AE NDT | AE NDT | IMP WP VIB | AE IMP WP VIB | AE VIB NDT | VIB WP NDT |
| Example: | Joosse et al (2002) | Kirikera et al (2007) | Dutton (2004) | Sutherland et al (1994) | Ghoshal et al (2000) | Rumsey and Paquette (2008) | Sørensen et al (2002) | Farinholt et al (2012) |
Note: AE: acoustic emission; SG: strain gauge; PZT: lead zirconate titanate (piezoelectric); MFC: macro-fiber composite (piezoelectric); OFS: optical fiber sensor; Acc: accelerometer; SLDV: scanning laser doppler vibrometer; NDT: nondestructive testing; IMP: impedance; VIB: vibration based; WP: wave propagation based.
4.1. AE Method
In the AE method, surface mounted piezoelectric sensors detect and locate the origin of sound waves by AE sensors. If the amplitude of detected AE events exceeds a certain threshold, they are recorded. Recorded AE signals are then characterized and analyzed in terms of features such as amplitude, duration, frequency, counts, rise time, energy, etc. The localization of AE events, a determination of transient stress wave origins or where damage has occurred, can then be based on the difference in time of arrival of the AE wave through linear or triangular location methods. Another aspect of damage localization is through the accumulated energy absorbed by the AE sensors over time. With increasing levels of damage, more acoustic energy is absorbed by the AE sensors, and the overall AE accumulation can be indicative of the damage locations (figure 17). It can also be used to determine damage severity for a given load; however conventionally this requires the application of long-sustained loads at a particular level.

Figure 17. Typical reading of from an AE sensor through the course of a destructive test of a wind turbine blade. As more damage occurs to the blade, more acoustic energy accumulates at the sensors (Schulz and Sundaresan 2006).
Download figure:
Standard image High-resolution imageMany damage indices can be employed for use with the AE method. The average signal level (ASL), for instance, is a measure of the amplitude of the corresponding rectified sinusoidal voltage that would result in the same power as the power of the continuously measured voltage from the AE sensors during a time period. The ASL, as a damage index, is indicative of the level of continuous AE, or equivalently, damage in a certain area. The ASL is computed as follows,

where T is the time period when AE events are active with t0 as the starting time, v(t) are the AE events beyond a certain threshold, usually called AE hits, and N is the total number of AE hits in the period T.
4.1.1. Full blade tests
Joosse et al (2002) conducted ten 4.5 m blades tests with six baseline blades and four defective blades with the AE method. Data from successively increasing maximum test loads during blade certification procedures have been shown to identify damage areas and can be used to indicate the likely location of failure. Kirikera et al (2007) connected twelve piezoelectric sensors to form four continuous sensors as a SNS, which were adhered to a 9 m long wind turbine blade for a quasi-static proof test at the National Renewable Energy Laboratory test facility in Golden, Colorado. The outputs of the four continuous sensors were sent as inputs to the SNS, whose two outputs indicated the time domain combined response of all the sensors and could track the propagation of waves on the wind turbine blade as well as the location of damage within a sensor grid (Schulz and Sundaresan 2006) (figure 18).

Figure 18. (a) Placement of PZT sensors near the root of a wind turbine blade to form a neural sensor network for monitoring damage; (b) schematic of sensor network (Schulz and Sundaresan 2006).
Download figure:
Standard image High-resolution imageIn the tests of a 4.25 m AEGIS blade, multiple damage locations were identified and later verified by sectioning of the blade. The peak AE energy signals were located in the blade root area (at 0.2 m) where some early but noncritical delamination damage was verified by visual observation (Dutton 2004).
Sutherland et al tested a Phoenix-built, thin-airfoil 7.9 m blade to failure using hydraulic rams at three points with a load distribution that simulated the load distribution on the blade under field operation (Sutherland et al 1994). Operating loads were measured on the root of a Micon 65/13 wind turbine in San Gorgonio Pass in California, and a total of 67.5 h of data were taken in 405 ten-minute records. The first phase produced a failure of the blade near its tip and a slower acoustic velocity value of 83 000 in s–1 (2.10 mm μs−1) was assumed in the tests and in the localization algorithms. The AE technique was able to follow the initial failure of the blade in real time and also locate other damaged areas.
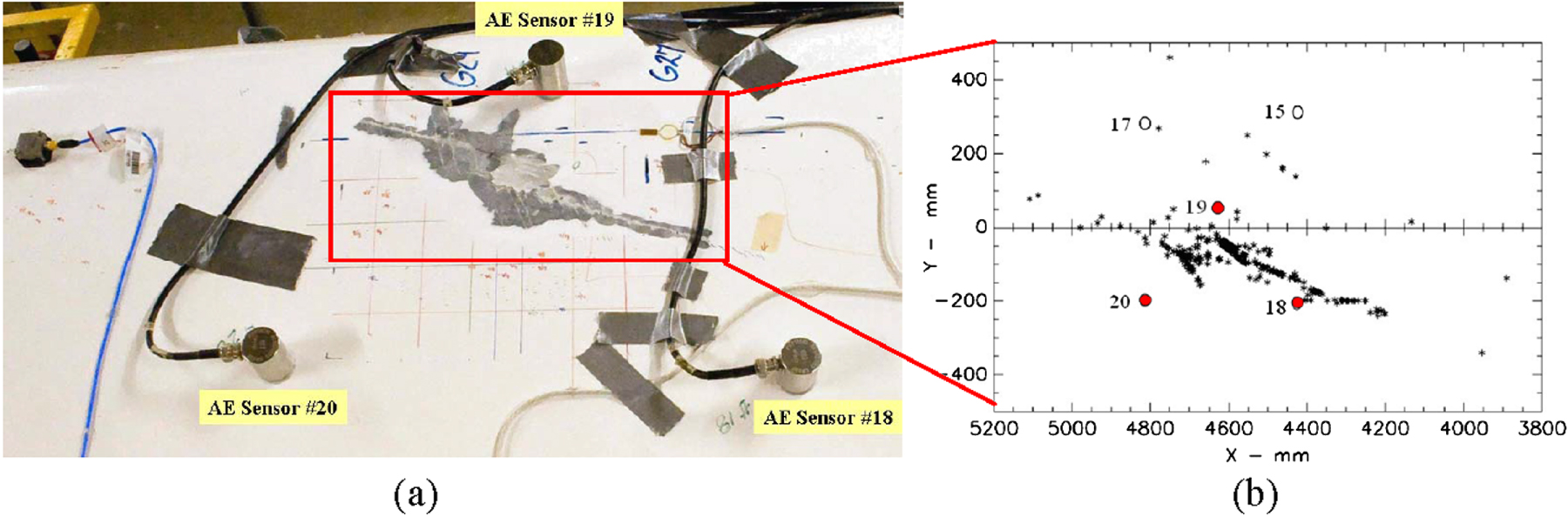
Rumsey and Paquette bonded 12 sensors on various stations of a TX-100 blade, and another 12 sensors concentrated around the root section of the blade (Rumsey and Paquette 2008). Preliminary tests were conducted to obtain acoustic velocity and attenuation measurements through ten pencil lead break tests with sensors separated by 0.05 m. For the TX-100 blade, the attenuations were between 0.02 and 0.10 dB mm−1, which corresponded to a spread in attenuation of 8–40 dB between sensors for the maximum chosen separation of 0.4 m. For the purposes of damage detection, the energy of the waveforms was used as the AE parameter to determine the intensity of the acoustic energy emission emitted per cycle in the damaged region. The AE energy is simply the sum of the product of the square of each digitized voltage times the digitization interval over the entire length of the transient signal. The AE sensors 18, 19 and 20 received significant AE events and clearly followed the evolution of damage accumulating on the high-pressure surface around the end of the spar cap at 4.5 m, with no significant damage in any of the other monitored areas. The monitoring damage traces were subsequently verified by visual inspection (figure 19) (Rumsey and Paquette 2008).

Figure 19. Application of AE sensor on full scale blade test. (a) Photo of AE sensors surrounding a damaged area; (b) characterization and localization of damage using AE sensor data (Rumsey and Paquette 2008).
Download figure:
Standard image High-resolution imageA full scale blade of 25 m was used in failure tests with three different load and support configurations (Jørgensen et al 2004). Prior to failure, a high level of AE events was distributed along the ultimate failure chord. The practical benefits of the AE method were obvious in the three tests: (1) identification of ongoing damage allows the test to stop before complete failure, (2) identification of unwanted damages at load yokes, and (3) location of damaged locations.
4.1.2. Comments on AE methods
The AE approach can currently be regarded as a standard practice for damage detection during blade tests since almost all scaled or full blade tests have AE sensors deployed. However, one main problem for blade damage detection with the AE method is its high acoustic attenuation and the requirement that many AE sensors be deployed to cover interested regions. Moreover, the AE method requires expensive and bulky equipment, which greatly limits its application to real-time damage detection of rotating blades.
4.2. IMP-Based method
The IMP-based method makes use of the electromechanical coupling of PZT patches bonded to a blade. Liang et al (Liang et al 1994) have shown analytically that the electrical IMP (complex ratio of voltage to current) of a bonded PZT is directly related to the local mechanical IMP (complex ratio of force to velocity) of the blade. Damage will cause a change in the blade's local mass, stiffness, or damping properties and consequently its mechanical IMP. Therefore, the blade's damage can be assessed by monitoring the PZT's electrical IMP (Pitchford et al 2007). Usually, the real part of the IMP is used for measurement because it was shown to be more sensitive to structural changes and less sensitive to temperature and other environmental effects. The damage index represent relative changes of the real part of the IMP between healthy and damaged blade (Park and Inman 2007) and can be defined as root mean squared deviation metric as follows,

where, Zi,h and the Zi,d are the IMP as the ith location for healthy and damage blade, respectively, Re( ) represent the real part, and δ is the difference in the average values between  and
and  . This IMP damage index is scaled by the baseline measurement and is corrected for vertical shift between measurements by subtracting δ from the interrogation IMP. This vertical shift does not always indicate damage but rather is due to changing environmental conditions such as temperature.
. This IMP damage index is scaled by the baseline measurement and is corrected for vertical shift between measurements by subtracting δ from the interrogation IMP. This vertical shift does not always indicate damage but rather is due to changing environmental conditions such as temperature.
In the TX-100 wind turbine blade tests (Pitchford et al 2007), the IMP-based system consisted of six MFC self-sensing actuators (M2814-P1), mounted on the blade surface and an Agilent HP4192A IMP analyzer. The IMP method failed to identify damage done to the TX-100 blade, which lay outside the range of MFC patches. However, the IMP-based method was able to detect damages on several feasibility tests of a CX-100 wind turbine blade section (Pitchford 2007) (figure 20).

Figure 20. (a) Photo of MFC patch; (b) data acquisition board for MFC patches; (c) installation of MFC patches within wind turbine blade (Pitchford 2007).
Download figure:
Standard image High-resolution imageOne superior advantage of IMP-based method is that in addition to detecting the damage sustained by a blade, the method can also be used to diagnose the fault of its PZT sensors, if there is any. Through computing the slope of the imaginary part of the admittance (inverse of the IMP) in the low frequency range, which is largely independent of the health state of its host blade, the self-diagnosing ability of PZT sensors can be achieved (Park et al 2006, Taylor et al 2012).
4.3. WP-Based method
One WP method is the comparison of the impulse response between damage and healthy states (Farinholta et al 2012). In a blade experiment by Ghoshal et al two PZT actuators at the center of the blade transmitted an impulse signal that received by four other PZT sensors to measure the responses on the medium between the actuator and sensors. The damage indicator is the integrated absolute difference of the two impulse responses for the healthy and damage cases over the interested time period (Ghoshal et al 2000) as follows,

where,  and
and  are strains measured at point i due to an impulse at point j of a blade at healthy and damaged states, respectively. T is the time period of significance.
are strains measured at point i due to an impulse at point j of a blade at healthy and damaged states, respectively. T is the time period of significance.
The WP-based approach was also investigated in the TX-100 blade tests, but the approach failed to identify damages (Rumsey and Paquette 2008). The reason for failure was that the MFC sensors were too far away from the failure area. However, the effects of the blade deterioration did affect the boundary conditions that were encouragingly detected by the MFC sensors.
From the results of the studies, the WP method appears to not be sensitive to damage outside the path between the actuator and sensor. Currently, one major problem associated with the WP-based methods for damage detection in turbine blades is the complex wave interaction with the blade composite, which makes meaningful interpretation of experimental data sometimes difficult.
Another form of WP-based monitoring method that has recently gained attention for applications in wind turbine blades is noncontact laser ultrasonic imaging and damage detection. Laser ultrasonics have been researched in the previous several decades for SHM (Davies et al 1993, Tanaka and Izawa 2001, Sohn and Krishnaswamy 2004). In laser ultrasonics, a high powered pulse laser such as Nd:YAG or CO2 lasers are used to locally heat the surface of the monitored structure. The pulses cause thermoelastic expansion induced waves of the material at ultrasonic frequencies. These waves can be measured by other sensors such as PZTs and AE sensors, or by laser interferometry. Recently several groups have applied laser ultrasonics for the monitoring of wind turbine blades and have demonstrated successful reults. Lee et al presented a portable laser ultrasonic propagation imaging system that can is able to target and scan a surface from long distance. Through an improved beam collimation (i.e. reducing the amount of beam dispersion per distance traveled) technique, the laser can be used for longer distances while maintaining enough focused power for generating ultrasonic waves. The waves generated by the laser is measured by an AE sensor and the data is processed through several wave subtraction algorithms to recreate an image of the plate surface in an effort to detect and localize damage. The new method was able to detect debonding in a carbon fiber reinforced plastic (CFRP) plate located 40 m away from the laser source (Lee et al 2011). Later, Park et al demonstrated the use of laser ultrasonics for use in moving bodies, such as actively rotating wind turbine blades. In their technique, a training step is introduced in which a laser impinges upon preset locations of a training grid assigned on the blade surface. An ultrasonic sensor measures and stores the responses of the laser excitation at each of these grid points. As the blade goes into operation, the laser re-excites the grid points and a correlation algorithm is used to compare to baseline signals. An image can be reconstructed from the waves generated at each excitation point and any damage can be visualized through wave anomalies (Park et al 2013). In a subsequent development of their technique, Park et al created a completely laser based monitoring solution in which a laser Doppler vibrometer is used to measure ultrasonic waves instead of any embedded sensors. The improvements in the system include the lack of need for embedded sensors, easy deployment in wide range of environments, and damage visualization without need for baseline data. The system successfully demonstrated detection of a debonding in a CFRP aircraft wing and delamination in a GFRP wind turbine blade samples (Park et al 2014). On the other hand, some areas that need improvement include the need for surface treatment in the locations that will be used for the vibrometer measurements in order to reduce noise levels. The time needed for the systems to inspect the entire blade may also be prohibitively long (Park et al 2013, Park et al 2014). Deployment in real operating blades has yet to be demonstrated, but there is excellent potential for further research.
4.4. VIB-Based method
The principle of traditional VIB methods is based on the fact that damage occurrence and growth will affect structural stiffness and thus, in turn, appear as changes in the structural modal properties, i.e. modal frequencies, mode shapes and damping ratios, and other derived dynamic properties. Through the measurement of changes in these dynamic properties between healthy and damaged states of a blade, damage can be identified, located and even evaluated to a certain extent.
The simplest VIB-based method is to compare a reference mode shape (referring to the undamaged wind turbine blade) with the experimental mode shape of a blade with some kind of damage imposed. Sorensen et al used this method to locate damage in an LM 19 m blade (Sørensen et al 2002). Damage was discovered by a vivid graphical comparison between the mode shapes related to the damaged and undamaged blade with an output-only modal analysis method.
Other than mode shapes, operational deflection shape method is also investigated. Ghoshal et al (2000) performed Fourier transforms of VIB responses at 114 points of an 8 ft section of a blade and plotted real amplitudes at selected phase angles to obtain the operational deflection shapes (Harne and Wang 2013). Subsequently, changes in the operational deflection shapes between the healthy and damaged blade were successfully applied to indicate and locate damage. Wang et al adopted the more simple frequency shifting as an damage indicator (Wang et al 2009). Although the VIB-based modal method failed in the TX-100 blade tests, measured second order harmonics were encouragingly shown to be on the magnitude of the driving frequency at the tip in the lead-lag and root-tip direction (Rumsey and Paquette 2008). Moreover, the in-plane displacement measurements between the damage location and root were found to be sensitive to the crack growth and direction.
Another VIB-based damage identification method is to analyze the changes of the transmittance function between healthy and damaged blades. The advantages of using the transmittance function are that the excitation force is canceled and the ratio of responses partially cancels changes in the transmittance functions due to environmental effects such as temperature changes. The damage index is the difference of the transmittance function between two positions integrated over the interested frequency range and divided by the integration of the transmission function of the healthy state at the same frequencies. The positions with peak damage indices represent the location of the damage (Ghoshal et al 2000) as described in the following equation.

where,  and
and  are the transfer functions between location r and s for healthy and damage blade states, respectively. f1 and f2 represent the frequency range in which transfer functions are sensitive to damages.
are the transfer functions between location r and s for healthy and damage blade states, respectively. f1 and f2 represent the frequency range in which transfer functions are sensitive to damages.
In another application, Kumar et al (2007) used the change in rotating frequency as an indicator to track damage growth of turbine blades. One interesting fact is that only several basic vibrational methods were applied for damage detection of turbine blades. Many structural monitoring and damage detection methods which are frequently investigated in the fields of civil and mechanical engineering are in absence (Alvandi and Cremona 2006, Worden et al 2007), especially finite element model based methods (Yuen et al 2006, Doliński and Krawczuk 2009). Since VIB-based methods require knowledge of the dynamic behavior of the structure in question, this absence may be partially attributed to difficult complex modeling of turbine blades for damage detection based on model validation (Ozbek et al 2013). Another drawback that limits the use of VIB-based methods for wind turbine blades is the inability to directly visualize and locate the damage. Changes in the environment, such as those caused by seasonal weather may also cause benign changes in the structural response that do not necessarily indicate damage, although their effects may be partially canceled through certain mathematical techniques (Ghoshal et al 2000).
4.5. Other nondestructive testing (NDT) methods
Other NDT techniques such as thermal imaging (Hahn et al 2002, Haj-Ali et al 2008, Manohar et al 2012), coherent optical technique with electronic speckle pattern shearography (Sutherland et al 1994), thermoelastic stress measurement (Stanley 1997, Dutton 2004) and digital image correlation (LeBlanc et al 2011) were also investigated (figure 21). Raišutis et al (2008) reviewed thoroughly these NDT methods, such as thermography, x-ray imaging and ultrasound techniques (Tuzzeo and Lanza di Scalea 2001) for monitoring of wind turbine blades and recommend to use several techniques in combination.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 21. (a) Thermal image of defects in a wind turbine blade (Manohar et al 2012); (b), (c) thermal versus ultrasound image of simulated defects (sheets of teflon at different layers) in a sample composite plate, respectively (Amenabar et al 2011); (d) operating principle of nondestructive ultrasonic damage detection (Raišutis et al 2008).
Download figure:
Standard image High-resolution image{kind=link}
Although these NDT techniques can be applied for damage detection of turbine blades, they are usually labor intensive for an extended time and the whole blade surface needs to be covered. Moreover, most NDT testing equipment is expensive and bulky. Considering the fact that operational turbine blades are rotating and not easily accessible due to their heights, these NDT methods are, at least in current stage, almost impossible to be applied in-field for operational blade damage detection and therefore, are not discussed further. Interested readers may consult Raišutis et al (2008).
5. Discussion
The paper reviews the industrial need for damage detection of potential failure of turbine blades, conventional sensors (strain gauges and accelerometers) and newly emerging sensors (fiber optic sensors, AE sensors, PZT sensors and MFC sensors) suitable for this purpose. Four promising damage detection methods were mentioned, namely AE, WP, IMP and modal based methods along with full blade tests, which are summarized in table 2.
Although many references have been consulted, this review is not meant to be exhaustive and the omission of relevant investigations is unavoidable. However, efforts have been made to ensure that this summary review comprehensive and representative of current engineering practice and future developments. In light of the previously mentioned technical advances, damage detection for turbine blade is far from mature and there are still many challenging issues to be resolved.
5.1. Operational and environmental influences on damage detection
Although many of the aforementioned damage detection techniques have been successfully applied to scale models or full scale tests of blades in controlled laboratory environments, the performance of these techniques in-field is still in question and requires further validation. One of the main obstacles for deploying a damage detection system for in-service blades is the environmental and operational variation of turbine blades, which may include nonuniform thermal gradients or changing boundary conditions (Meruane and Heylen 2012). As noted by Rumsey and Paquette, (Rumsey and Paquette 2008) 'the dynamic features of the blade were sensitive to the variations in ambient temperature, which have to be paid more attention in future investigations'.
In fact, these changes can often mask subtler structural changes caused by damage since dynamic features of the blades are sensitive to the variations in ambient temperature and operational conditions as well. To eliminate these environmental and operational influences of turbine blades, data normalization methods such as factor analysis, statistical means (Sohn 2007), cointegration, outlier analysis and principal component analysis (Cross et al 2012) and recent state-space reconstruction (Figueiredo et al 2010) maybe employed. For example, Häckell and Rolfes (Häckell and Rolfes 2013) presented the application of their data normalization technique to a wind turbine tower ((5MW AREVAM 5000 plant AV07), although not of a blade due to considerable operational condition variations. Twelve biaxial sensors are mounted at six levels of the wind turbine tower located in the German Bight about 45 km north of the Island Borkum. Data classification was performed through affinity propagation k-means data clustering analysis for sixty-four different set-ups measured from 15 February 2010 to 31 May 2011. These data sets were normalized by mean and standard deviation to account for changing environment conditions.
On the other hand, the turbine blade may not always totally satisfy the assumption of a time invariant system between its docking and operating conditions. For a rotating wind turbine, certain important turbine modes have exceedingly high aeroelastic damping ratios ranging from 10% to 60% in terms of critical damping ratio which causes VIB modes to be very difficult (if not impossible) to be detected by most currently available system identification algorithms, as discussed by Ozbek et al (2013).
5.2. Optimal sensor placement and electric-mechanical coupling model for turbine blades
During the fatigue test of the TX-100 blade as shown in table 2, sensors were recommended to be placed around the maximum chord area and on the compression side of the blade (Rumsey and Paquette 2008). However, the TX-100 blade actually failed from fatigue after four million cycles on the tensile side of the blade at the spar cap termination point at 4.5 m, which was significantly different from expectation. The MFCs, PZT sensors and accelerometers were all placed as recommended around the maximum chord area and the related WP-, IMP- and modal based damage detection techniques failed in the test since they may have been too far away from the failure location. Therefore, there is an urgent need to strategically place the sensors at appropriate positions. For VIB-based damage detection, there are many existing sensor placement methods that can be consulted, for instance, effective independence (Li et al 2007), MinMAC algorithm (Li et al 2008) and the recent load dependent sensor placement method (Li et al 2012).
For most local methods, damage cannot be detected when they are located outside the range of deployed sensors. Therefore, blade failure regions should be known or at least reasonably estimated a priori (Haenler et al 2006) and modeling techniques with smart sensors such as PZT and MFC and their coupling effects (Peairs 2006, Bhalla and Moharana 2012) need to be developed.
5.3. Remote or wireless transmission of sensor signals
Almost all of the reviewed damage detection methods, regardless of using conventional sensors or newly emerging sensors, have direct cable or wire connections between sensors and data acquisition equipment except (Tsopelas et al 2012). Since turbine blades operate in a rotating mode, wireless transmission of measured signal is a necessary step to allow feasibility of online field damage detection of operational turbine blades in the future (Rumsey 2011).
Tsopelas et al (2012) presented the first successful efforts for long-term AE monitoring of a full-scale in-service rotating wind turbine blades with wireless transmission. They used multiple AE wireless nodes and a wireless base station module. Each of these AE wireless nodes was a complete, single-channel, micro-computer operated AE system, which was also able to accept parametric inputs such as strain or temperature as provided by blade operators. AE sensors and the AE wireless nodes were installed in the blade. The wireless base station was installed in the nacelle and was plugged through USB into a laptop computer to directly monitor and control AE wireless nodes. The system monitored a rotating wind turbine for almost 2 months, and 48 h of AE data were acquired in six different days. Results indicated the feasibility of collecting AE signals from rotating blades. On the other hand, sensors close to the blade root seem to be susceptible to excessive mechanical noise and possibly caused by the rotor bearings or the gearbox of the wind turbine.
Another kind of damage detection method that has been implemented in a wireless configuration is the IMP-based method. Inman and Grisso brought more attention to the concept of wireless IMP-based monitoring through the introduction of a dedicated energy harvesting module. They developed a prototype which had individually functional components for separate wireless sensing and energy harvesting. However, some work still remains to be done before all components can work together to form a fully integrated and practical system (e.g. need improvements in the amount of energy harvested) (Inman and Grisso 2006). Usually, wireless sensors may form a network, which has the responsibility of covering a geographic area (the sensor field) in terms of certain measurand; alternatively, a sensor supports a point-to-point link in which the data acquisition end is attached to a wireline network (Elachi and Van Zyl 2006). According to Lynch (Lynch 2007), a wireless sensor network typical needs to support the following functionalities: intrinsic node functionality; signal processing, including digital signal processing (e.g., FFT), compression, forward error correction, and encryption; control and actuation; clustering and in-network computation; self-assembly; communication; routing and forwarding; and connectivity management.
5.4. Energy harvesting techniques
Conventional line power supply is not convenient to acquire damage monitoring data from wired sensors since wind turbine blades are usually in rotation. Even for wireless sensors, an energy supply is still needed to power signal wireless transmission from sensor nodes to a certain remote station. During energy harvesting, ambient energy is converted into electrical energy in order to provide a very small amount of power for low-energy electronics. Three widely used transduction mechanisms for energy harvesting include piezoelectric, electromagnetic and electrostatic generators. Piezoelectric generators use active materials that generate a charge when mechanically stressed and of the three is the most promising harvesting technique for blade damage detection (Beeby et al 2006, Inman and Grisso 2006). Another advantage of piezoelectric harvesting is its easy integration to PZT sensing technique as commented in Erturk and Inman (2011).
Some efforts have also been made to develop miniaturized sensor nodes that consumes significantly less energy. For instance, transceivers have been developed for wireless data acquisition systems that minimize power or energy dissipation (i.e., <5 nJ/(correct) bit) for an energy-limited source, and minimize power (i.e., <100 μW) by using the following strategies: self-configuring networks, fluid trade-off between communication and computation, an integrated system-on-a-chip approach, and aggressive low-energy architectures and circuits (Sohraby et al 2007, Harne and Wang 2013).
Inman and Grisso (2006) have successfully built prototypes of these types of wireless systems and have improved upon them through advances in hardware systems with onboard computing, including actuation and sensing, computational algorithms, and wireless telemetry. Therefore, integration of sensors, energy harvesting techniques, and wireless communications network interface on a chip would further facilitate the transmission of sensor data and critical information about health status of a blade, and such is the future trend for practical field damage detection of turbine blades.
5.5. Mode localization phenomena and damage mechanism of turbine blades
Mode localization refers to the situation in which modal response is confined to only a segment of one turbine blade when compared with a conventional mode shape that extends throughout three blades (Pierre 1990). Mode localization phenomenon, now known as Anderson localization in solid state physics, was first studied by Anderson (1958), who won the 1977 Nobel physical prize because of this discovery (Lagendijk et al 2009). Anderson localization means that an ordered metallic solid with a regular crystal lattice could change abruptly from a conductor to a semiconductor or even dis-conductive when this order is destroyed by imperfections or impurities (mistuning), i.e., the motion of electrons in a solid becomes localized and metallic conduction becomes impossible.
In real structures, no two components will be precisely identical. Imperfect manufacturing and installation processes will invariably produce small random variations in the properties of each component. Investigations (Hodges 1982) have shown that cyclically symmetric structures that are weakly coupled with dense modal frequencies are susceptible to mode localization, such as bladed disks in the turbine and compressor rotors in aircraft and industrial gas turbines, which consist of a circular disk with many blades mounted at equidistant positions around its circumference and thus is a typical cyclic periodic structure. Such mistuning due to imperfections has long been known to have a significant effect on the global mode shapes of a blade disk, and in some cases could cause the modes to localize around a single blade (Valero and Bendiksen 1986, Bendiksen 2000). This provides a plausible explanation for selective blade failure from metal fatigue whereas none of the other blades in the rotor exhibit fatigue damage.
In fact, current horizontal wind turbines usually have three blades mounted around the hub and can be considered as a type of circumferential cyclic structure. The three-bladed configuration may suffer from the mode localization effects, from the authors' conjecture. The blade failures may also be caused by confined local modes, which lead to high compression or tension fatigue stress in certain blade regions similar to that of bladed disks in aircraft and industrial gas turbines. However, there is no related investigation of mode localization for wind turbine blades to the authors' knowledge. The damage mechanism of wind turbine blades due to mode localization is, therefore, a prospective research area and its investigation would be beneficial to improve damage detection methods of wind turbine blades.
Acknowledgments
This work was jointly supported by the Science Fund for Creative Research Groups of the National Natural Science Foundation of China (Grant Nos. 51121005 and 51327003).