Paper:
Integration of Multiple Sensors into an ROV for Remote Measurement in the Fukushima Daiichi Nuclear Power Station
So Kamada
 and Kazuya Nishimura
and Kazuya Nishimura
National Maritime Research Institute
6-38-1 Shinkawa, Mitaka, Tokyo 181-0004, Japan

To measure and analyze the distribution and criticality of submerged fuel debris “in situ” in the decommissioning process of the Fukushima Daiichi Nuclear Power Station (1F), we developed a system for remote measurement using multiple sensors consisting of the neutron sensor, the sonar, and the sub-bottom profiler (SBP) mounted on a small remotely operated underwater vehicle (ROV). First, the locations presumed to contain fuel debris were explored based on the information of the water bottom shape obtained using the sonar and the bottom surface substructure obtained using the SBP. Second, the system identified the location of fuel debris by detecting neutrons emitted by spontaneous fissions of fuel debris using the neutron sensor with diamond elements. Simulated fuel debris was placed at the bottom of a test water tank that simulated the pedestal. In the primary containment vessel (PCV) of 1F, and a verification test of remote measurement was conducted using the ROV mounted on the multiple sensors. The desired results were obtained.
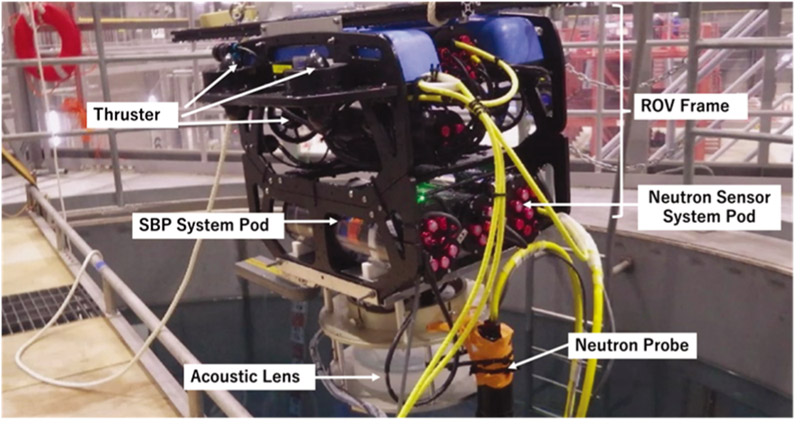
Picture of ROV integrated with multiple sensors
- [1] W. M. Tian, “Integrated Method for the Detection and location of Underwater Pipelines,” Aool. Acoust., Vol.69, No.5, pp. 387-398, 2008. https://doi.org/10.1016/j.apacoust.2007.05.001
- [2] T. Kishishita et al., “A membrane, pseudo-vertical p-i-n diamond detector,” J. Nucl. Sci. Technol., Vol.60, No.10, pp. 1285-1291, 2022. https://doi.org/10.1080/00223131.2023.2190548
- [3] H. Uetsuka and F. Fumihisa, “Companion sample examination and related study at JAERI,” Proc. of Three Mile Island Reactor Pressure Vessel Investigation Project Open Forum, pp. 269-280, 1994.
- [4] “National Astronomical Observatory of Japan, Chronological Scientific Tables,” Maruzen, 2022.
- [5] S. Kamada, M. Kato, K. Nishimura, M. Nancekievill, S. Watson, B. Lennox, A. Jones, M. J. Joyce, K. Okumura, and J. Katakura, “Development of ROV system to explore fuel debris in the Fukushima Daiichi Nuclear Power Plant,” Prog. Nucl. Sci. Technol., Vol.6, pp. 199-202, 2019. https://doi.org/10.15669/pnst.6.199
- [6] M. Nancekievill, A. R. Jones, M. J. Joyce, B. Lennox, S. Watson, J. Katakura, K. Okumura, S. Kamada, M. Katoh, and K. Nishimura, “Development of a Radiological Characterization Submersible ROV for Use at Fukushima Daiichi,” IEEE Trans. on Nuclear Science, Vol.65, No.9, pp. 2565-2572, 2018. https://doi.org/10.1109/TNS.2018.2858563
- [7] J. Kusano (Ed.), “Collection of Radiation Resistant Characteristics Reports for Instruments and Materials in High Dose Rate Environment,” JAEA-Review, Article No.2008-012, 2008. https://doi.org/10.11484/jaea-review-2008-012
- [8] JAEA Collaborative Laboratories for Advanced Decommissioning Science (CLADS) and High Energy Accelerator Research Organization (KEK), “Research and Development of Radiation-resistant Sensor for Fuel Debris by Integrating Advanced Measurement Technologies (Contract Research)–FY2020 Nuclear Energy Science & Technology and Human Resource Development Project–,” JAEA-Review, Article No.2021-042, 2021. https://doi.org/10.11484/jaea-review-2021-042
- [9] JAEA Collaborative Laboratories for Advanced Decommissioning Science (CLADS) and National Institute of Maritime, Port and Aviation Technology, “Research and Development of the Sample-return Technique for Fuel Debris Using the Unmanned Underwater Vehicle (Contract Research)–FY2021 Nuclear Energy Science & Technology and Human Resource Development Project–,” JAEA-Review, Article No.2022-070, 2022. https://doi.org/10.11484/jaea-review-2022-070
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.