Development Report:
Development of Wireless Communication Status Monitor Function for Mobile Robot Tele-Operation
Fumiya Shibukawa*, Shunichi Yamazaki*, Yoshiharu Kaneshima*, Hiroki Murakami*, Daisuke Endo**
 , Takeshi Hashimoto**
, and Genki Yamauchi**
, Takeshi Hashimoto**
, and Genki Yamauchi**
*Technology & Intelligence Integration, IHI Corporation
1 Shin-Nakahara-cho, Isogo-ku, Yokohama 235-8501, Japan
**Public Works Research Institute
1-6 Minamihara, Tsukuba, Ibaraki 305-8516, Japan

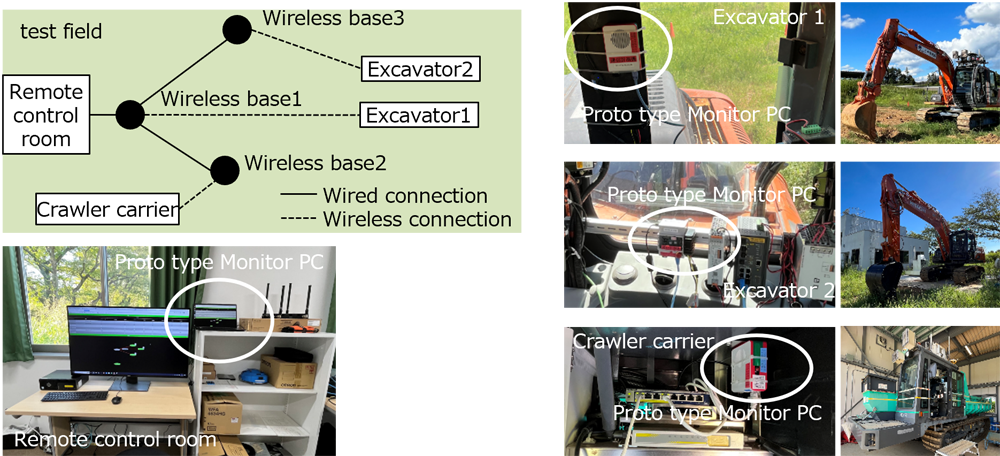
At unmanned construction sites, machinery generally stops functioning or tele-operation is interrupted owing to the problems related to wireless communication. However, the entry of human workers into such sites is often restricted, making it extremely difficult for workers to resolve problems or restore connections in wireless communication. In this study, we interviewed personnel from relevant industries to identify common issues in wireless communication. To address these issues, we focused on improving the availability of wireless communication and proposed a wireless communication status monitoring function. The results from a prototype of the proposed function are also presented.
Wireless communication status monitor
- [1] H. Hanawa et al., “Development of Tele-Operated Robot Robo QS for Backhoes,” J. of IHI Technologies, Vol.58, No.3, pp. 47-54, 2018 (in Japanese).
- [2] H. Murakami et al., “Development of the remote-controlled heavy carrier robot for shallow water area and evaluation in the external field test—Realization of shallow water area work system by remote-controlled operation—,” The 19th Symp. on Construction Robotics in Japan (19th SCR), Session ID:OS-2, 2019.
- [3] M. Watanabe et al., “Self-position estimation using sensor fusion of GNSS and scan matching with measurement accuracy index,” The 36th Annual Conf. of the Robotics Society of Japan (RSJ2018), Session ID:1P1-03, 2018.
- [4] S. Yuta, “Development of a Remotely Controlled Semi-Underwater Heavy Carrier Robot for Unmanned Construction Works,” J. Disaster Res., Vol.12, No.3, pp. 432-445, 2017. https://doi.org/10.20965/jdr.2017.p0432
- [5] F. Shibukawa et al., “Development of Operator-Assisted Function for Carrier Robot for Shallow Water with Operation Remotely (CASTOR),” The 24th Intelligent Mechatronics Workshop (IMEC2019), Session ID:IMEC_220, 2019.
- [6] F. Shibukawa et al., “A Remote Control System that Enables Quick initial Response for Remotely Controlled Semi-Underwater Heavy Carrier Robots (CASTOR),” The 37th Annual Conf. of the Robotics Society of Japan (RSJ2019), Session ID:1G1-04, 2019.
- [7] F. Shibukawa et al., “Wireless Communication Strength Measurements in Actual Field Experiment of the Remote-Controlled Heavy-Carrier Robot for Shallow Water,” 2018 JSME Conf. on Robotics and Mechatronics (ROBOMECH2018), Session ID:2A2-C03, 2018.
- [8] H. Yoshida, T. Kumagai, and K. Satoda, “Dynamic State-Predictive Control for a Remote Control System with Large Delay Fluctuation,” Proc. of the 2018 IEEE Int. Conf. on Consumer Electronics (ICCE), 2018. https://doi.org/10.1109/ICCE.2018.8326072
- [9] D. Endo et al., “Proposal of an open research and development environment for autonomous construction,” Japan Construction Information Senter (JACIC) Information, No.128, Part 1, 2023 (in Japanese).
- [10] G. Yamauchi et al., “Proposal of an Open Platform for Autonomous Construction Machinery Development,” Proc. of the 40th Int. Symp. on Automation and Robotics in Construction (ISARC2023), pp. 186-191, 2023. https://doi.org/10.22260/ISARC2023/0027
- [11] F. Shibukawa et al., “Development of Wireless Communication Status Monitoring Function for Mobile Robot Control,” The 21st Symp. on Construction Robotics in Japan (SCR21), Session ID:O2-2, 2023.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.