Citation:
Xie, A.; Yan, X.; Liang, W.;Zhu, S.; Chen, Z. Large-SizedMultirotor Design: AccurateModeling with Aerodynamics andOptimization for Rotor Tilt Angle.
Drones
2023
,
7
, 614. https://doi.org/10.3390/drones7100614Academic Editors: Enrico Boni andMichele BassoReceived: 22 August 2023Revised: 26 September 2023Accepted: 27 September 2023Published: 29 September 2023
Copyright:
© 2023 by the authors.Licensee MDPI, Basel, Switzerland.This article is an open access articledistributed under the terms andconditions of the Creative CommonsAttribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
drones
Article
Large-Sized Multirotor Design: Accurate Modeling withAerodynamics and Optimization for Rotor Tilt Angle
Anhuan Xie
1,2
, Xufei Yan
2
, Weisheng Liang
3,
*, Shiqiang Zhu
1,2
and Zheng Chen
1,3,4
1
The Ocean College, Zhejiang University, Zhoushan 316021, China; xieanhuan@zhejianglab.com (A.X.);sqzhu@zju.edu.cn (S.Z.); zheng_chen@zju.edu.cn (Z.C.)
2
The Intelligent Robot Research Center, Zhejiang Laboratory, Hangzhou 311100, China;yanxufei@zhejianglab.com
3
The State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University,Hangzhou 310027, China
4
The Ocean Research Center of Zhoushan, Zhejiang University, Zhoushan 316021, China
*
Correspondence: ws.liang@zju.edu.cn
Abstract:
Advancements in aerial mobility (AAM) are driven by needs in transportation, logistics,
rescue, and disaster relief. Consequently, large-sized multirotor unmanned aerial vehicles (UAVs)with strong power and ample space show great potential. In order to optimize the design processfor large-sized multirotors and reduce physical trial and error, a detailed dynamic model is firstly
established, with an accurate aerodynamic model. In addition, the center of gravity (CoG) offset andactuator dynamics are also well considered, which are usually ignored in small-sized multirotors. To
improve the endurance and maneuverability of large-sized multirotors, which is the key concern in
real applications, a two-loop optimization method for rotor tilt angle design is proposed based on the
mathematical model established previously. Its inner loop solves the dynamic equilibrium points to
relax the complex dynamic constraints caused by aerodynamics in the overall optimization problem,
which improves the solution efficiency. The ideal design results can be obtained through the offline
process, which greatly reduces the difficulties of physical trial and error. Finally, various experiments
are carried out to demonstrate the accuracy of the established model and the effectiveness of the
optimization method.
Keywords:
large-sized multirotor; dynamics modeling; aerodynamics; endurance; maneuverability;
design method; structure optimization; rotor tilt angle
1. Introduction
For the past half century, multirotor unmanned aerial vehicles (UAVs) have developed
rapidly and have been successfully applied in the fields of aerial photography, industrialinspection, and precision agriculture [
–
]. However, most of the current applications are
based on small-sized multirotors, which have limited available space and load capacity. Incontrast, large-sized multirotors have stronger power and larger space, which can expand
their application scope to transportation, logistics, rescue, and disaster relief [
–
], the key concern for large-sized
multirotors is their endurance and maneuverability.
To improve the flight performance of multirotors, including endurance and maneuver-
ability, the design of the rotor tilt angle is an effective and simple method. For example,fully actuated multirotors usually adopt this design to achieve six-degrees-of-freedom(DoF) movement [
]. This type of design changes the direction of the force and torquegenerated by the actuator by tilting the rotor to achieve different design goals. In generalterms, a dihedral angle can improve the hovering stability [
], and a cant angle can im-
prove the maneuverability of the yaw motion [
]. However, the rotor tilt angle design
Drones
2023
,
7

Drones
2023
,
7
, 614 2 of 18
sacrifices the lift force, and the output forces of tilted rotors partially cancel each other out,
so an incorrect design may even result in reduced flight performance.
For the design of general multirotors, various methods have been proposed in the
literature. Most studies focus on the sizing and selection of propulsion system components,
according to different design requirements, such as flight maneuverability [
], batteryendurance [
], safety and reliability [
], design automation [
], etc. As for the rotor
tilt angle design, the dynamic manipulability measure method is proposed in [
] for hexro-
tors considering tilt angles and the arrangement of rotors. In [
], a numeric estimationand optimization method is presented for the dynamic performance of multirotors with
tilted rotors.
However,thedesignmethodsmentionedabovearetargetedtowardssmall-ormedium-sized multirotors. In fact, in addition to the inherent complex characteristics of multirotors,
such as motion coupling, the design of large-sized multirotors presents more difficulties
and challenges than the design of small-sized ones. This is because the increase in size leads
to a larger effect of nonlinearities and uncertainties that can be neglected in small-sized
multirotors, including center of gravity (CoG) offset, aerodynamics, and actuator dynamics.
On the other hand, large-sized multirotors are not convenient for physical trial and error
designs, whichputsforwardhigherrequirementsfortheeffectivenessofthedesignmethod
and the accuracy of the mathematical model used in the design.
In other words, accurate modeling is important for the design of large-sized multi-rotors. First of all, an accurate rigid-body dynamic model can be established based onNewton–Euler equations [
], including the factors of CoG offset and the positionsof rotors. In [
], actuator dynamics is also considered to improve the flight controlperformance of multirotors. As for the modeling of aerodynamics, which is complex butimportant, a gray-box aerodynamics model is identified for quadrotors in [
], the finite element analysis technique is used to analyze
theaerodynamiceffectsofactuators. Furthermore, ageneralexplicitmathematicalmodelof aerodynamics is required for the design of multirotors. The simplified mathematical modelof aerodynamics is adopted in [
]. In [
], an accurate model of the aerodynamics of arotor is derived in detail. In addition, blade flapping and coaxial effects are analyzed in [
Inthisstudy,inordertoimprovetheeffectivenessofofflinedesignandreducephysical
trial and error for large-sized multirotors, a dynamic model of large-sized multirotors is
established in detail, including accurate rigid-body dynamics, aerodynamics, and actuatordynamics. Then, to improve the endurance and maneuverability of large-sized multirotors,
the optimization method for rotor tilt angle design is introduced based on the established
mathematical model. The main contributions of this study can be summarized in the
following three points.
1. A dynamic model of large-sized multirotors is established accurately for use in
offline design or parameter tuning. The CoG offset, aerodynamics, and actuator dynamics
are well considered, which are neglected in small-sized ones. The high accuracy of the
established mathematical model is verified through experiments.
2. A two-loop optimization method for rotor tilt angle design is proposed based on
the accurate dynamics model to improve endurance and maneuverability. Specifically, theinner loop is introduced to solve the equilibrium points of dynamic equations. This actually
relaxes the complex constraints caused by aerodynamics, so the overall optimization
problem can be solved effectively. In addition, the proposed method can also be extended
to other design tasks.
3. Benefiting from the highly accurate dynamic model and the efficient optimizationmethod, ideal design results can be obtained through the offline process, which greatlyreduces the difficulties of physical trial and error. Simulations and experiments are con-
ducted to verify that the optimized design improves the maneuverability and endurance of
large-sized multirotors.
Drones
2023
,
7
, 614 3 of 18
model of the multirotors is established, including rigid-body dynamics, aerodynamics, andactuator dynamics. The optimization method for rotor tilt angle design, with its motivationand purpose, is introduced in Section 2. In Section 4, various experiments are carried out to
demonstrate the accuracy of the established model and the effectiveness of the optimization
Notation 1.
• ∈
R
>
0
represents a positive definite matrix. Given
a
,
b
∈
R
3
,
a
×
represents the
skew–symmetric matrix of
a
that satisfies
a
×
b
=
a
×
b
. The inverse operation of
•
×
is denoted as
•
∨
, i.e.,
(
a
×
)
∨
=
a
. The unit vector of the
z
-axis is denoted as
n
z
= [
0 0 1
]
T
.
2. System Modeling
In this section, the dynamics models are analyzed in detail. In addition to the rigid-
body dynamics of multirotors and the mechatronic dynamics of motors, the aerodynamics
of propellers, including the effect of rotor tilt angles, is also carefully considered, which is
usually ignored for small-sized multirotors but is crucial for large-sized multirotors.
2.1. Rigid-Body Dynamics
To develop the rigid-body dynamics model of multirotors, coordinate systems are
I
represent the north–east–down (NED) inertia reference
frame, and
B
represent the forward–right–down (FRD) body-fixed frame.
Figure 1.
Coordinate systems for multirotors.
Let
p
= [
x y z
]
T
∈
R
3
and
v
= [
u v w
]
T
∈
R
3
denote the position and velocity
expressed in frame
I
, respectively.
R
∈
SO
(
3
)
represents the rotation matrix from frame
B
to frame
I
, and
ω
= [
p q r
]
T
∈
R
3
is the angular velocity expressed in frame
B
. Accordingto Newton–Euler equations [
], the rigid-body dynamics of multirotors can be established
as follows:˙
p
=
v
(1)
m
˙
v
=
mg
n
z
+
f
r
+
f
u
(2)˙
R
=
R
ω
×
(3)
J
˙
ω
=
−
ω
×
J
ω
+
τ
r
+
τ
u
(4)with
f
r
=
−
m
R
˙
ω
×
+
ω
×
ω
×
r
g
(5)
τ
r
=
−
m
r
×
g
R
T
(
˙
v
−
g
n
z
)
(6)
in which
g
∈
R
+
is the gravity constant;
m
∈
R
+
and
J
∈
R
>
0
are the mass and the inertia
tensor of the multirotors, respectively;
r
g
∈
R
3
denotes the center of gravity (CoG) vector;
Drones
2023
,
7
, 614 4 of 18
f
r
∈
R
3
and
τ
r
∈
R
3
are the force and torque caused by
r
g
, respectively; and
f
u
∈
R
3
and
τ
u
∈
R
3
are the resultant force and torque generated by the propellers, respectively.
Remark 1.
The resultant force
f
u
and torque
τ
u
generated by the propellers vary according to the
configuration of the multirotors. They are determined by the position and attitude (i.e., the tilt
angles) of each rotor, which further affect the manipulation characteristics of the multirotors.2.2. Aerodynamics
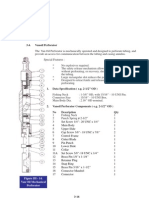
2.2.1. Blade Flapping
For large-sized multirotors, the blade flapping effect cannot be ignored. Based onthe equivalent torsion spring approximation shown in Figure 2, the first-order harmonic
approximation of the blade flapping motion can be expressed as
β
=
a
0
−
a
1
cos
ϕ
−
b
1
sin
ϕ
(7)
where
β
is the blade flapping angle;
ϕ
is the blade direction angle expressed in the wind-axis frame;
a
0
is the blade taper angle; and
a
1
and
b
1
are the longitudinal and lateral
periodic flapping coefficients in the wind-axis frame. According to [
], the blade paddle
dynamics can be described as follows.
¨
a
0
¨
a
1
¨
b
1
+
D
˙
a
0
˙
a
1
˙
b
1
+
K
a
0
a
1
b
1
=
f
(8)
where
D
is the damping matrix,
K
is the stiffness matrix, and
f
is the excitation vector.
D
,
K
, and
f
are obtained by solving the moment balance equations acting on the equivalent
Figure 2.
Equivalent torsion spring approximation, in which
¯
e
is the dimensionless hinge offset;
W
is
the flapping amplitude at 0.75
R
; and
W
tip
is the flapping amplitude at the tip.
2.2.2. Propeller Aerodynamics
Theaerodynamicsactingonthepropelleriscalculatedusingthebladeelementmethod,
considering the blade flapping. Let
T
,
H
W
, and
Y
W
be thrust, rearward, and lateral force,
respectively. The aerodynamic forces are expressed as