
![]()
![]()
![]()
Autoware is the world's first "all-in-one" open-source software for self-driving vehicles. The capabilities of Autoware are primarily well-suited for urban cities, but highways, freeways, mesomountaineous regions, and geofenced areas can be also covered. The code base of Autoware is protected by the Apache 2 License. Please use it at your own discretion. For safe use, we provide a ROSBAG-based simulation environment for those who do not own real autonomous vehicles. If you plan to use Autoware with real autonomous vehicles, please formulate safety measures and assessment of risk before field testing.
You may refer to Autoware Wiki for Users Guide and Developers Guide.
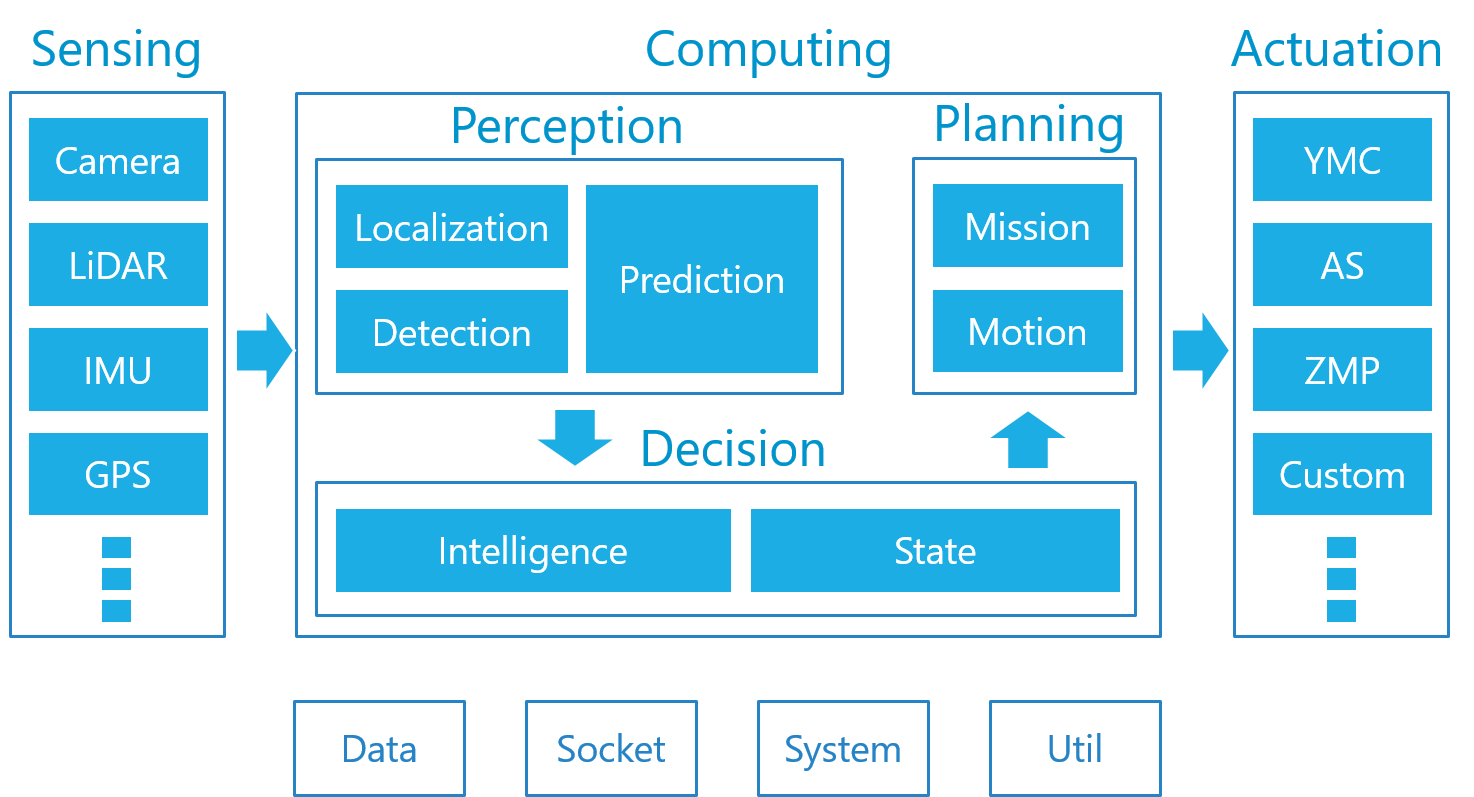
Autoware provides a rich set of self-driving modules composed of sensing, computing, and actuation capabilities. An overview of those capabilities is described here. Keywords include Localization, Mapping, Object Detection & Tracking, Traffic Light Recognition, Mission & Motion Planning, Trajectory Generation, Lane Detection & Selection, Vehicle Control, Sensor Fusion, Cameras, LiDARs, RADARs, Deep Learning, Rule-based System, Connected Navigation, Logging, Virtual Reality, and so on.
Free manuals can be also found at Autoware-Manuals. You are encouraged to contribute to the maintenance of these manuals. Thank you for your cooperation!

- Number of CPU cores: 8
- RAM size: 32GB
- Storage size: 64GB+
- Contribution Rules (Must Read)
- Overview
- Specification
-
S. Kato, S. Tokunaga, Y. Maruyama, S. Maeda, M. Hirabayashi, Y. Kitsukawa, A. Monrroy, T. Ando, Y. Fujii, and T. Azumi,``Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems,'' In Proceedings of the 9th ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS2018), pp. 287-296, 2018. Link
-
S. Kato, E. Takeuchi, Y. Ishiguro, Y. Ninomiya, K. Takeda, and T. Hamada. ``An Open Approach to Autonomous Vehicles,'' IEEE Micro, Vol. 35, No. 6, pp. 60-69, 2015. Link
You may test Autoware at Autoware Online. No need to install the Autoware repository to your local environment.
You may annotate and train your ROSBAG data using your web browser through Automan. The trained models can be used for deep neural network algorithms in Autoware, such as SSD and Yolo.
You may download a number of test and simulation data sets from Tier IV's ROSBAG STORE. Note that free accounts would not allow you to access image data due to privacy matters.
You may create 3D map data through Tier IV's Map Tools. The 3D map data used in Autoware are composed of point cloud structure data and vector feature data.
Autoware is provided under the Apache 2 License.
Autoware Developers Slack Team
Please see the Support Guidelines for more details about getting help.