
Preprint
Article
Energy Modeling for Electric Vehicles Based on Real Driving Cycles: An Artificial Intelligence Approach for Microscale Analysis
Altmetrics
Downloads
99
Views
44
Comments
0
A peer-reviewed article of this preprint also exists.


This version is not peer-reviewed
Submitted:
01 February 2024
Posted:
02 February 2024
You are already at the latest version
Alerts
Abstract
The paper outlines a methodology for developing a model to estimate energy consumption in electric vehicles (EVs). The most robust validation indicators were exhibited by an artificial intelligence method, specifically neural networks. Within this framework, two predictive models for EV energy consumption were developed for winter and summer conditions, based on actual driving cycles. Such models hold particular significance for microscale road analyses. The resultant model for test data in summer conditions demonstrates validation indicators with an R2 of 86% and an MSE of 1.4, while for winter conditions, the values are 89% and 2.8, respectively, confirming its high precision. The paper also presents exemplary applications of the developed models, utilizing both real and simulated microscale data. The results obtained and the presented methodology can be especially advantageous for decision-makers in city road management and infrastructure planners, aiding both cognitive understanding and better planning of charging infrastructure networks.
Keywords:
Subject: Engineering - Automotive Engineering
1. Introduction
The transportation sector is the second largest source of CO2 emissions worldwide, responsible for approximately 34% of its total production [1]. These emissions come from the combustion of fossil fuels, including diesel, petrol, and heavy oils. In addition to CO2 emissions, the burning of these fuels leads to the release of N2O, CH4, CO, and other gases, all of which are considered greenhouse gases (GHG) [2]. Without significant change, this situation contributes to climate change, including the global rise in average temperatures. One method to counteract this phenomenon is the adoption of alternative fuels in transportation and the implementation of different vehicle propulsion systems, such as those based on electric platforms [3,4,5].
The market for EVs is gradually expanding, and in the near future, it is expected to capture a significant share of the overall vehicle market. Already, in some countries like Norway, the EV market accounts for 83% of new vehicle sales [6]. The increased adoption of EVs on roads will lead to a considerable reduction in overall fuel consumption and emission levels. This situation underscores the need for the development of precise models for EV energy consumption.
The limited range of EVs poses one of the most significant challenges for car manufacturers and simultaneously acts as a key impediment to the widespread adoption of this technology on a global scale. Faced with this challenge, precise modeling of energy consumption by EVs becomes indispensable, as it enables a better understanding and prediction of their energy behavior. Developing rapid and accurate energy models for electric vehicles, which allow for a more precise estimation of their energy consumption, is particularly crucial. It is worth highlighting that the difficulty in predicting energy consumption arises from the diversity of operating conditions, such as fluctuating ambient temperatures and varied driving routes. The development of advanced energy models is essential not only for vehicle manufacturers but also for charging infrastructure planners. Effective forecasting of energy consumption by electric vehicles enables better planning and deployment of charging stations, contributing to the improvement of the infrastructure supporting electric vehicles. Consequently, the advancement of sophisticated energy models for electric vehicles plays a pivotal role in removing barriers associated with limited range, simultaneously accelerating their acceptance on a global scale.
Currently, there exists a specific group of models, based on developed algorithms and simulated using macro-scale tools, aimed at estimating the overall energy consumption of electric vehicles [7,8]. However, there is a noticeable gap in the availability of models capable of accurately estimating instantaneous energy consumption based on specific input data, such as vehicle speed and acceleration. One of the existing microscale models addressing this issue is [9]. However, it is important to note that despite its presence, this model is characterized by certain limitations that impact its universality and practical application. This model focuses on the microscopic modeling of vehicle traffic and the simulation of instantaneous energy consumption, which is its strength. However, it should be noted that this model has certain limitations, primarily in relation to the fact that it was created and validated based on data from dynamometer test cycles rather than real-world road conditions. These limitations affect its ability to provide comprehensive and accurate results in various road conditions. Consequently, despite the presence of some microscopic models, there is still a need to develop more comprehensive models of instantaneous energy consumption that take into account various factors influencing energy consumption in real-time.
Another approach to modeling EV parameters is the macroscale model, exemplified by [10]. In this study, a simulation-based quasi-statistical approach was used to estimate the energy consumption of electric vehicles (EVs). The developed method is scalable for implementation in regions other than those examined in the study. However, it is important to note that this model has certain limitations, particularly the inability to be used for determining instantaneous energy from vehicles on the road in real time.
Taking the above into consideration, this study was conducted on the creation of an instantaneous energy consumption prediction model for electric vehicles (EVs) using artificial intelligence methods on a microscale. The data utilized in the study consist of road data containing real driving cycles from various tests. The paper includes a comparison of various artificial intelligence techniques and presents the method that performed the best among the created EV energy models. The selected predictive method for energy is the neural network technique. The prediction models were developed in the Python programming environment. The created models are characterized by simplicity, since only the vehicle speed and acceleration data are needed as input for energy calculations. The source of these data can be versatile, which means that the model can be used for real road data and simulated data.
Given that the energy consumption of electric vehicles mainly depends on road conditions and environmental properties, especially air temperature, the models created cover both warm and cold environmental conditions. The paper includes a description of the method, data collection, and processing, followed by the presentation of the validation results of the created models and their exemplary applications. The work concludes with a discussion section containing a detailed description of the results and a comparison of the results obtained with a review of existing literature.
2. Methods
The work involves developing and presenting a methodology for creating a model of energy consumption by electric vehicles on a microscale. While there are still relatively few such models, the number of electric vehicles on the roads is increasing, creating a strong need for the development of new models or the expansion of existing ones to include new types of EVs. The developed methodology involves analyzing real data from electric vehicle journeys and creating a microscale model based on this analysis, aiming for maximum universality. The energy models developed are based on predictive artificial intelligence techniques. The universality and potential use of the EV energy model lie in its ability to be applied in various applications for different purposes. Input data, defined as explanatory variables, must also be readily available for each application. For this purpose, vehicle speed and acceleration were chosen as explanatory variables, serving as attributes for the input data. These data can be easily obtained from real journeys using On-Board Diagnostics (OBD) systems or GPS, from vehicle movement trajectories captured by cameras, or from road sensors. Such data can also be provided by simulation tools.
The data necessary for creating the model were collected during real-world journeys under various environmental conditions. Considering that the performance and range of electric vehicles depend on external temperatures, data was collected for both summer and winter periods. These data were intentionally separated to create two different models for the energy consumption of electric vehicles. The data was recorded at a frequency of 1 Hz. An illustrative dataset aggregated into a table is presented in Table 1.
Table 1, in addition to data related to environmental conditions crucial for electric vehicle (EV) batteries, also includes general technical information such as battery temperature at the beginning and end of the test, as well as its state of charge. Since the focus of the work is on creating energy consumption models for EVs, the collected data were divided into two models representing the modeling of this attribute concerning ambient temperature for weather conditions classified broadly as cold and warm. The data for warm conditions comprised 11,506 records, while for cold conditions, there were 11,708.
In Table 2, selected operational data of the EV used to aggregate real-world data from road tests are presented.
For the development of EV energy models, the Google Colab environment and Python 3 programming language were used. Models were computed using the T4 GPU, which allows faster calculations compared to standard CPU and GPU on regular computers. Google Colab, being a Python runtime environment in the cloud, provides free access to GPU resources, facilitating research in machine learning [11]. The use of the T4 GPU on Turing Tensor Core architecture accelerates tensor operations, which is crucial for efficient training of deep neural network models [12]. This combination of technologies allows researchers to conduct experiments with the Python language, achieving a significant acceleration of numerical computation, especially in the field of artificial intelligence. The most important parameters needed to create the input model were vehicle speed, vehicle acceleration, battery voltage, and battery current. From the parameters of battery voltage and battery current, the power and then the amount of consumed was calculated, which will be used as the energy measure (Wh) in the later part of the study.
The workflow is depicted in Figure 1, which highlights three main fundamental steps: data collection, data processing, and potential use. As previously described, the first stage involves collecting the data required to create the energy model. The collected data were divided into two groups: external conditions for warm temperature and for cold temperature measurements. The data obtained undergo a qualitative analysis and must be processed appropriately. Data processing in the creation of artificial intelligence models involves collecting, cleaning, and normalizing data to prepare them for machine learning. This process also includes feature engineering, categorical variables, and splitting into training, validation, and test sets. The models are then trained on the training data, evaluated on the validation data, and, after adjusting parameters, if necessary, finally tested on the test set. The processed data can be used to train new models. The selected techniques include linear regression, random forest, gradient boosting, and neural networks. All models were validated based on the analysis of the charts, including residual plots, and R2 and MSE were calculated for each. On the basis of this, the best model was identified. The best model, in this case, the one based on the neural network method, was used to demonstrate its potential use. In this regard, the paper illustrates the use of the energy model to create an energy map in the context of new real-world data from a route driven in Rzeszów (Poland) and simulated data for a roundabout object obtained from the PTV Vissim software.
3. Results
The first stage of the work involved the data for creating the energy models of electric vehicles (EVs). The aggregated data from real road cycles were saved in the.xls format and then prepared in the.csv format, with individual attributes separated by a semicolon. Below, the data will be presented by separating road cycles for summer and winter conditions. Figure 2 illustrates the data set used to create the EV energy consumption prediction models.
Based on Figure 2 of the conducted road tests, aggregated data can be observed for speed, acceleration, and other explanatory variables regarding the dependent variable, which is the energy of the EV. At this stage of data analysis, it is already evident that, for winter conditions, the energy consumed during driving is higher, applying to practically every speed interval for the analyzed road cycles.
The data presented for both summer and winter conditions were divided into datasets. To effectively evaluate the performance of the machine learning model, the data was split into two sets: training and testing. The train_test_split function from the scikit learn library was used for this purpose. The test set, comprising 20% of the total data, was separated from the training set, which consisted of the remaining 80%. The random_state=100 parameter was used to ensure the reproducibility of the result and facilitate comparisons between different models.
The chosen model learning methods include linear regression, random forest, gradient boosting, and neural network. All results from these methods were validated by the model based on the R2 coefficient, MSE, residual plots, and predicted vs. observed charts. The best method was selected to showcase an exemplary use of the EV energy model.
The aim of selecting these methods was to demonstrate, in relation to the advancement of each machine learning technique, the results that can be achieved. Each method has a certain complexity, and its execution for input data requires a certain time frame. Therefore, it may be appropriate to use the simplest method that provides satisfactory results to limit the time required for the computation algorithms.
3.1. Linear Regression Calculations
Linear regression is a statistical method that is used to model the relationship between an independent variable and a dependent variable, assuming that this relationship is linear [13]. In the case of linear regression analysis, the goal is to fit the best-fitting line (regression) to the data points to minimize the differences between the actual values and those predicted by the model. The linear regression model utilizes an equation of a line, where the dependent variable is a linear combination of independent variables, and the coefficients of this combination are estimated based on the training data [14]. The final model enables the prediction of the values of dependent variables for new data, allowing for trend analysis, forecasting future values, and understanding the strength and direction of the relationship between variables. The validation model coefficients for the winter and summer conditions are presented in Table 3.
The mean square error (MSE) measures the average square difference between actual and predicted values. A smaller MSE indicates a better fit of the model to the data [15]. On the provided results for both training and testing data, it can be observed that the model for warm conditions achieves lower MSE values, indicating a better fit to the data in terms of this parameter. However, it is essential to note that this relationship and the statement about which model is better do not necessarily correspond to the R2 coefficient. In this case, the model for cold conditions has a higher R2 value, suggesting that it generally predicts future data better.
Figure 3 presents a comparison of predicted vs. observed plots and residuals for both temperature conditions.
Based on Figure 3, we can assess whether the values predicted by the model align closely with the actual values. From this, it can be observed that the model for warm conditions exhibits a slightly better reflection of reality for practically every examined data range. The cold conditions also oscillate within similar ranges on this plot, but there are some differences in the estimated values for the range of 5-20Wh.
For the residual plot, it is essential to check whether the values are evenly distributed around the zero axis. Here, for both warm and cold conditions, there are some underestimations and variations in these plots. In summary, while this method provides quick results, it also introduces some inaccuracies in the modeled estimation of the EV energy.
3.2. Random Forest Calculations
The Random Forest method is a machine learning tool that is based on the principle of combining multiple decision trees into a single model. By randomly selecting samples and features during the construction of each tree, the model becomes more resistant to overfitting the training data [16]. During prediction, each tree contributes its input, and the final decision is made based on a voting mechanism. Random Forest finds applications in various fields, offering high prediction accuracy, flexibility, and the ability to handle diverse data. In addition, it enables the identification of significant features, which is crucial in practical applications. The validation model coefficients for the winter and summer conditions are presented in Table 4.
In terms of the R2 coefficient, the model performs better for cold conditions, while with respect to the MSE coefficient, the model for warm conditions produces better results. The comparison of the Random Forest method for predicted versus observed and residuals for both temperature conditions is presented in Figure 4.
Based on data from Table 4 and Figure 4, it can be observed that the model utilizing the Random Forest technique performs slightly better to predict energy data from electric vehicles. However, to explore even better computational techniques, the results for gradient boosting and neural network will be presented in the next part of the study.
3.3. Gradient Boosting Calculations
Gradient Boosting is an advanced machine learning method that builds a model by combining weighted decision trees. This algorithm iteratively corrects errors from previous models, focusing on areas where larger errors were made [17]. It is effective in modeling complex dependencies in data, and through the iterative process, it can handle diverse types of data. Despite its effectiveness, careful tuning of parameters such as tree depth is necessary to avoid overfitting the model. The results of the validation model coefficients for the gradient boosting method for both winter and summer conditions are presented in Table 5.
For the Gradient Boosting method, a clear improvement in validation results for both MSE and R2 coefficients can be observed. Model errors have decreased to the range of 1-3 MSE, and R2 coefficients oscillate in the range of 0.85-0.89, indicating a high level of model representation against actual data. In Figure 5, a comparison of plots for the Gradient Boosting method for Predicted vs. Observed and residuals for both temperature conditions is presented.
For this method, both for the predicted vs. observed plot and the residuals plot (Fig. 5), it can be observed that the data have a more uniform distribution. The data also fit into patterns to a lesser extent, indicating that the model using this method significantly better represents the actual data.
3.4. Neural Network Calculations
Neural networks are an advanced machine learning method inspired by the structure of the brain. It consists of layers of interconnected artificial neurons, including input, hidden, and output layers [18]. During the learning process, weights are adjusted, minimizing the error between the model's predictions and actual data. In the case of the utilized code, a sequential model with dense layers was created, where’relu’ activation functions were applied to the hidden layers, and the output layer used a 'linear' function. The input data was normalized to the range [0, 1] using Min-Max scaling. The model was trained on the training dataset and then evaluated on the test dataset. The validation results for the neural network method under winter and summer conditions are presented in Table 6.
The neural network method performs as well as gradient boosting in predicting energy values for the EV model. This method has been recognized as the best method for estimating EV energy. The choice of this method is justified by its superior validation results, especially for the test set. Figure 6 illustrates the comparison of graphs for the neural network method, showing Predicted vs. Observed and residuals for both environmental temperature conditions.
The results presented in Figure 6 are qualitatively similar to the gradient boosting method. However, differences can be observed in that the results are less scattered from the axis 0, indicating that this method has smaller errors compared to the gradient-boosting method. Therefore, in the next part of the work presenting the potential use of the EV energy model, the results will be presented taking into account this particular model.
4. Utilizing the Obtained EV Energy Model for Microscopic Analysis
The obtained EV energy model based on the neural network technique will be used to predict energy consumption for different vehicle traffic scenarios. The first scenario will be based on a new, real road trip. The second scenario involves the use of the obtained energy model for simulation analysis on a microscopic scale. The scheme that illustrates the procedure to utilize the model is presented in Figure 7.
The model operates based on input data, ideally at a frequency of 1Hz for the speed and acceleration of the EV. Using the results generated, we obtain EV energy consumption in Wh. With such data, we can generate, for example, energy maps for EVs to better tailor infrastructure, such as charging points, to the needs of electric vehicles. A microscale model can be used, for instance, to determine average energy consumption rates for aggregated vehicle speeds, providing a macroscale model. In addition to energy maps, further data analysis is possible for average energy values or, for example, cumulating energy based on the duration of the trip.
4.1. Road Tests and Use of the Model
To create energy maps for the EV, a road trip was conducted in Rzeszów, Poland. Figure 8 shows the route under study and the vehicle used.
The route covered a passage through the urban area characterized by increased traffic density and a section of the expressway. Using the developed model, the energy consumption of the electric vehicle was calculated based on the data of the route. Figure 9 presents the results of the EV energy model for the route studied.
Based on Figure 9, areas of increased energy consumption can be observed for the examined EV. When comparing the summer environmental conditions of the model with the winter conditions, it can be noticed that, especially in the context of higher vehicle speeds on the highway, there are more areas characterized by higher energy consumption by the EV. For the energy data records cumulated from 750 seconds of the test, a spike in energy consumption can be observed precisely at the beginning of the driving phase on the highway. Based on the cumulative energy amount for the entire driving cycle, significant differences due to ambient temperature can also be observed. For example, for summer conditions, the total accumulated energy for the studied route was approximately 2700 Wh, while for winter conditions, it was close to 4500 Wh. The potential benefits of analyzing such energy maps for EVs are that they can be used for better planning of charging points, especially for highways and expressways, where the energy consumption of vehicles increases significantly. For microinfrastructure analysis, we can also examine the detailed distribution of energy from EVs during the passage through specific road solutions, such as X-shaped intersections, T-shaped intersections, or roundabouts. This is crucial in the context of planning future investments or modifying traffic light control in cities to minimize energy consumption by vehicles. Regenerative braking is also possible on these vehicles to optimize traffic control in the city. Regeneration energy values in batteries are presented based on the basis of negative values. The microscale for infrastructure solutions will be presented in the next subsection of this work.
4.2. Simulation Studies and Use of the Model
In the next step, an attempt was made to use the developed model for microscale simulation analyses. Microscale simulation studies of vehicle and energy consumption prediction models for EVs are promising tools with potential significance in various fields. Firstly, these analyzes can play a crucial role in planning the infrastructure for electric vehicles, enabling precise placement of charging stations. In the field of electric vehicle engineering, these simulations can be utilized by manufacturers to optimize vehicle parameters, influencing their energy efficiency and range. In the context of urban traffic management, predictive models of energy consumption can support strategies for managing electric vehicle fleets, with the aim of minimizing emissions and operational costs. In the long term, the results of these studies have the potential to contribute to an overall improvement in energy efficiency in transportation, shaping a more sustainable approach to transport development.
The simulation studies were conducted using Vissim software. PTV Vissim is a comprehensive traffic simulation software distinguished by its advanced microscopic traffic model [19]. Its uniqueness lies in the ability to accurately model individual vehicle behaviors, taking into account aspects such as lane changes, acceleration, and compliance with traffic signals [20]. This software allows for an accurate representation of complex traffic scenarios, which is crucial for planning and analyzing road infrastructure. The program is based on the Wiedemann traffic model developed by Wiedemann (versions 74 and 99) [21].
The study involved modeling an existing roundabout to assess the energy consumption of its entrance, exits, and travel along the circulatory road. The study was based on real traffic intensity data during peak hours. There is also a planned reconstruction of this roundabout in the future, making use of such models highly recommended for developing road projects that are as sustainable as possible. Vehicle traffic on the roundabout was also calibrated for driving conditions in Rzeszów, based on the real driving cycles of Rzeszów drivers. Figure 10 presents a view of the modeled scenario.
Based on Figure 10, it can be observed that the roundabout studied was a two-lane roundabout, and all the entrance and exit roads from it were also two-lane. In the simulation, it was assumed that all vehicles on this roundabout are electric vehicles (EV). Of course, a mixed simulation with conventional vehicles (powered by gasoline and diesel) is also possible, but then it is necessary to additionally use a model for predicting energy consumption for vehicles powered by such fuels.
To utilize the model, it is necessary to obtain speed and acceleration data for all vehicles present in the model. For this purpose, the option of saving the data in an.fzp file for the desired attributes. The simulation data was saved with a sampling frequency of 1Hz. An example view of the saved data is presented in Figure 11.
Figure 11 presents an exemplary set of data saved in the.fzp format automatically recorded during the simulation. Saving data in this format allows quick adaptation to data processing requirements in the Python language. The data are separated by semicolons, and only the adjustment of attribute names for input data to the model is necessary. After uploading such a file in the modified.csv format to the data repository, it is possible to quickly use it to calculate EV energy consumption based on speed and acceleration data. To create EV energy maps, vehicle position data, which are also recorded, is additionally utilized.
The results of the simulations conducted and maps of EV energy consumption are shown in Figure 12.
Figure 12 presents a portion of the results obtained from the EV traffic on the roundabout. On the basis of it, we can observe a comparison of the model's utilization for summer and winter conditions. For winter conditions, especially for roundabout exits, significant energy consumption of electric vehicles can be observed. For summer conditions, this consumption is lower and the path of higher consumption is shorter. Importantly, energy recovery by electric vehicles during braking is also significant in this context. The example presented relates to the high density conditions and general congestion in this area. The roundabout itself is located at the intersection of main traffic routes and the national road, with numerous shops, hospitals, and shopping centers in the vicinity. The model obtained shows significant potential in the context of microanalyses because the results obtained can serve as potential information sets for the planned reconstruction of this intersection. In addition to the emission maps, cumulative energy charts for both conditions analyzed can be observed. The total energy consumed by all vehicles that appeared in the model for winter conditions is over 4 times higher than for summer conditions. Observations on the increase in electric vehicle (EV) energy consumption in the roundabout in winter conditions compared to summer conditions can be justified by several factors. Firstly, low ambient temperatures in winter negatively affect the efficiency of electric vehicle batteries, leading to increased energy consumption. In addition, the need to heat the vehicle interior in the colder months contributes to a higher energy consumption, causing an additional load on the battery. Winter tires also increase rolling resistance. As a result, electric vehicles experience reduced range in winter conditions, requiring more energy consumption to cover the same distance compared to the summer period. Consequently, studies on roundabouts show that energy consumption in winter conditions can be more than four times higher than in summer conditions, which poses a significant challenge in the context of efficient management of electric vehicle energy resources.
4. Discussion
The models of EV energy consumption can be useful on various fronts:
- For urban transport decision-makers in making decisions about the location of charging stations, especially for highways.
- For analyzing and reporting the energy efficiency of infrastructure objects for transport planning, which can be valuable in the design phase.
- The model can be scalable to other EVs.
- The utilization of the model is versatile and the input data can come from various sources.
- It is possible to determine the average energy consumption indicators for different road objects and classes of roads, which can result in the development of universal energy consumption indicators for the evaluation of future projects.
In the above, selected possible scenarios for utilizing the developed electric vehicle energy models have been described. An important aspect in the context of preparing such computational models is also the consideration of regenerative braking, which allows energy recovery. In this case, the electric motor acts as an energy generator and transfers the generated energy to the vehicle battery system. Some studies [22] suggest that electric vehicles (EVs) are more efficient when driving in stop-and-go conditions on urban roads. In particular, differences in this regard are noticeable during free-flowing traffic on highways and expressways, where energy recovery does not occur at all. This situation contrasts with vehicles with internal combustion engines, where the excess energy produced during braking, along with heat loss, leads to a significant decrease in fuel efficiency [23]. Road studies have shown that electric vehicles consume less energy when driving in urban areas because energy recovery is possible under such conditions [24]. In the context of this, as well as the developed energy models, which also allow for the reflection of regenerative braking phenomena, these propositions can be confirmed. This is an extremely useful feature of these models, adding value for stakeholders who can utilize such models to design road networks and better plan infrastructure, such as fast charging points, which are desirable on roads. In winter conditions, with cabin heating and negative air temperatures, electric vehicles consume a considerable amount of energy during travel, affecting their reduced range, which can be decreased by up to 40% compared to higher summer temperatures.
The creation of new energy models for electric vehicles is also significant in the context of the increasing number of new models of these vehicles. In addition to leading global automotive manufacturers, new EV manufacturers, many of them from China [25], are entering the competition for the consumer market. Battery technology also undergoes continuous modifications and changes in material technology. This creates a continuous need to create accurate models estimating the energy consumption of these vehicles. Although there is already a library of works dedicated to this issue, few of them address the microscale while remaining simple, fast, accurate, and enabling the creation of emission maps.
One of the works that focuses on micro-scale modeling is [26], where the authors create models for EVs for various energy systems related to battery technology. This work presents models for EV parameters such as voltage, SOC, and current. However, as seen, it covers a different range of forecasted parameters. However, such created models have limited usability. Another work is [27], where the authors describe the issues related to the creation of models for the energy of EV batteries. They emphasize that most works are conducted on battery models and simulated results. They point out the limitations of these models and propose to create a new dynamic battery model that also considers temperature changes. The simulations in this work are performed using Matlab/Simulink software.
Another work that employs similar methods for developing models is [28]. In this work, the authors use the XGBoost method to create a model for predicting the charging demand for PEV (Plug-in Electric Vehicle). The work is practically significant as it predicts the demand for session charging demand at different times of the day, which can improve the vehicle charging network. However, the model obtained by the authors shows only a prediction capability for the R2 coefficient. A thematically related work is also [29], where the authors create an electric vehicle performance model characterized by greater detail. The model created by them is calibrated on experimental data. The authors point out, based on the results, that the average speed of the vehicle has the greatest impact on energy consumption. They also indicate that regenerative braking allows 2.43% of energy in congested traffic conditions on city roads.
In the context of the growing importance of artificial intelligence methods, the direction of model development is indicated in the work [30], where the authors demonstrate examples of the use of Python libraries to create future predictive models for electric vehicles.
As the importance and quantity of EVs increase, the importance of vehicle traffic simulations also grows [31]. Many works concern the combination of vehicle energy models with traffic simulations, especially at the micro-scale [32,33]. This is a crucial issue as it allows better planning of road space, the layout of these roads, and allows better future projects. It also allows better planning of vehicle charging points in urban and suburban areas.
5. Conclusions
Using artificial intelligence techniques to model electric vehicle energy enables the creation of precise predictive models that include both energy consumption and recuperation during regenerative braking. The application of such models holds significant potential, notably due to the model developed in this study featuring a minimal input data set and flexibility in the source of these data.
Key points of the study include:
- For data based on summer temperature, the model validation indicators for the test data show an MSE of 1.5 and an R2 of 0.87.
- For data based on winter temperature, the model validation indicators for test data indicate an MSE of 2.8 and an R2 of 0.89.
- The energy consumption data for a single cycle under winter conditions are 40% higher.
- In the simulated data, for a large number of vehicles passing through the studied microscale object, the differences in total energy consumption for the 100% electric vehicle fleet reach up to 400% for winter conditions compared to summer conditions.
In light of the observed differences in energy consumption based on real-world and simulated driving data, it is essential to emphasize the importance of developing such models for various environmental conditions. The future direction of the research is undoubtedly to expand the database to include additional road cycling scenarios, extend the study to other regions, and examine a greater variety of vehicles.
Funding
This research received no external funding
Data Availability Statement
Data can be made available to those interested
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Krause, J., Thiel, C., Tsokolis, D., Samaras, Z., Rota, C., Ward, A., ... & Verhoeve, W. EU road vehicle energy consumption and CO2 emissions by 2050–Expert-based scenarios. Energy Policy, 2020, 138, 111224. [CrossRef]
- Azni, M. A., Md Khalid, R., Hasran, U. A., & Kamarudin, S. K. Review of the effects of fossil fuels and the need for a hydrogen fuel cell policy in Malaysia. Sustainability, 2023, 15, 4033. [CrossRef]
- Cernat, A., Pana, C., Negurescu, N., Lazaroiu, G., Nutu, C., & Fuiorescu, D. Hydrogen—An alternative fuel for automotive diesel engines used in transportation. Sustainability, 2020, 12, 9321. [CrossRef]
- Kuszewski, H., Jaworski, A., Mądziel, M., & Woś, P. The investigation of auto-ignition properties of 1-butanol–biodiesel blends under various temperatures conditions. Fuel, 2023, 346, 128388. [CrossRef]
- Kuszewski, H., Jaworski, A., & Mądziel, M. Lubricity of Ethanol–Diesel Fuel Blends—Study with the Four-Ball Machine Method. Materials, 2021, 14, 2492. [CrossRef]
- Hou, X., Su, M., Liu, C., Li, Y., & Ma, Q. Examination of the Factors Influencing the Electric Vehicle Accident Size in Norway (2020–2021). World Electric Vehicle Journal, 2023, 15, 3. [CrossRef]
- Pokharel, S., Sah, P., & Ganta, D. Improved prediction of total energy consumption and feature analysis in electric vehicles using machine learning and shapley additive explanations method. World Electric Vehicle Journal, 2021, 12, 94. [CrossRef]
- Jinasena, A., Burheim, O. S., & Strømman, A. H. A flexible model for benchmarking the energy usage of automotive lithium-ion battery cell manufacturing. Batteries, 2021, 7, 14. [CrossRef]
- Fiori, C., Ahn, K., & Rakha, H. A. Power-based electric vehicle energy consumption model: Model development and validation. Applied Energy, 2016, 168, 257–268. [CrossRef]
- Xu, X., Aziz, H. A., Liu, H., Rodgers, M. O., & Guensler, R. A scalable energy modeling framework for electric vehicles in regional transportation networks. Applied Energy, 2020, 269, 115095. [CrossRef]
- Ray, S., Alshouiliy, K., & Agrawal, D. P. Dimensionality reduction for human activity recognition using google colab. Information, 2020, 12, 6. [CrossRef]
- Kasper-Eulaers, M., Hahn, N., Berger, S., Sebulonsen, T., Myrland, Ø., & Kummervold, P. E. Detecting heavy goods vehicles in rest areas in winter conditions using YOLOv5. Algorithms, 2021, 14, 114. [CrossRef]
- James, G., Witten, D., Hastie, T., Tibshirani, R., & Taylor, J. (2023). Linear regression. In An introduction to statistical learning: With applications in python (pp. 69-134). Cham: Springer International Publishing.
- Zhou, H., Yao, F., & Zhang, H. Functional linear regression for discretely observed data: from ideal to reality. Biometrika, 2023, 110, 381–393. [CrossRef]
- Araújo, R. S. A., Tironi, J. C., Parreira, W. D., Borges, R. C., De Paz Santana, J. F., & Leithardt, V. R. Q. Analysis of Adaptive Algorithms Based on Least Mean Square Applied to Hand Tremor Suppression Control. Applied Sciences, 2023, 13, 3199. [CrossRef]
- ElSahly, O., & Abdelfatah, A. An Incident Detection Model Using Random Forest Classifier. Smart Cities, 2023, 6, 1786–1813. [CrossRef]
- Chatterjee, S., & Byun, Y. C. A Synthetic Data Generation Technique for Enhancement of Prediction Accuracy of Electric Vehicles Demand. Sensors, 2023, 23, 594. [CrossRef]
- Gawlikowski, J., Tassi, C. R. N., Ali, M., Lee, J., Humt, M., Feng, J.,... & Zhu, X. X. A survey of uncertainty in deep neural networks. Artificial Intelligence Review, 2023, 56 (Suppl. 1), 1513–1589. [CrossRef]
- Mądziel, M., & Campisi, T. Investigation of Vehicular Pollutant Emissions at 4-Arm Intersections for the Improvement of Integrated Actions in the Sustainable Urban Mobility Plans (SUMPs). Sustainability, 2023, 15, 1860. [CrossRef]
- Shi, X., Yang, S., & Ye, Z. Development of a Unity–VISSIM Co-Simulation Platform to Study Interactive Driving Behavior. Systems, 2023, 11, 269. [CrossRef]
- Šarić, A., Sulejmanović, S., Albinović, S., Pozder, M., & Ljevo, Ž. The Role of Intersection Geometry in Urban Air Pollution Management. Sustainability, 2023, 15, 5234. [CrossRef]
- Apata, O., Bokoro, P. N., & Sharma, G. The risks and challenges of electric vehicle integration into smart cities. Energies, 2023, 16, 5274. [CrossRef]
- Wróblewski, P. Investigation of energy losses of the internal combustion engine taking into account the correlation of the hydrophobic and hydrophilic. Energy, 2023, 264, 126002. [Google Scholar] [CrossRef]
- Shams Ashkezari, L., Succetti, M., Jabœuf, R., Tosco, P., & Brenna, M. Are Commercial EV Chargers Ready to Aid with Household Power Consumption? Electronics, 2023, 12, 2065. [CrossRef]
- Wang, Q., Liu, X., & Wang, L. Predicting the Market Penetration Rate of China’s Electric Vehicles Based on a Grey Buffer Operator Approach. Sustainability, 2023, 15, 14602. [CrossRef]
- Ibrahim, A., & Jiang, F. The electric vehicle energy management: An overview of the energy system and related modeling and simulation. Renewable and Sustainable Energy Reviews, 2021, 144, 111049. [CrossRef]
- Benabdelaziz, K., & Maaroufi, M. Battery dynamic energy model for use in electric vehicle simulation. International Journal of Hydrogen Energy, 2017, 42, 19496–19503. [CrossRef]
- Almaghrebi, A., Aljuheshi, F., Rafaie, M., James, K., & Alahmad, M. Data-driven charging demand prediction at public charging stations using supervised machine learning regression methods. Energies, 2020, 13, 4231. [CrossRef]
- Xie, Y., Li, Y., Zhao, Z., Dong, H., Wang, S., Liu, J.,... & Duan, X. Microsimulation of electric vehicle energy consumption and driving range. Applied Energy, 2020, 267, 115081. [CrossRef]
- Mądziel, M.; Campisi, T. Energy Consumption of Electric Vehicles: Analysis of Selected Parameters Based on Created Database. Energies 2023, 16, 1437. [Google Scholar] [CrossRef]
- Mądziel, M. Vehicle Emission Models and Traffic Simulators: A Review. Energies 2023, 16, 3941. [Google Scholar] [CrossRef]
- Mądziel, M. Future Cities Carbon Emission Models: Hybrid Vehicle Emission Modelling for Low-Emission Zones. Energies 2023, 16, 6928. [Google Scholar] [CrossRef]
- Mądziel, M. Instantaneous CO2 emission modelling for a Euro 6 start-stop vehicle based on portable emission measurement system data and artificial intelligence methods. Environ Sci Pollut Res 2024, 31, 6944–6959. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Simplified workflow.

Figure 2.
3d scatter plots of Acceleration vs Velocity v Energy for both researched ambient conditions.
Figure 2.
3d scatter plots of Acceleration vs Velocity v Energy for both researched ambient conditions.

Figure 3.
Comparison of graphs for the linear regression method for predicted vs. observed and residuals for input data for the two environmental conditions tested: a) warm, b) cold.
Figure 3.
Comparison of graphs for the linear regression method for predicted vs. observed and residuals for input data for the two environmental conditions tested: a) warm, b) cold.

Figure 4.
Comparison of graphs for Random Forest method for predicted vs. observed and residuals for input data for two tested environmental conditions: a) warm, b) cold.
Figure 4.
Comparison of graphs for Random Forest method for predicted vs. observed and residuals for input data for two tested environmental conditions: a) warm, b) cold.

Figure 5.
Comparison of graphs for the gradient boosting method for predicted vs. observed and residuals for input data for the two environmental conditions tested: a) warm, b) cold.
Figure 5.
Comparison of graphs for the gradient boosting method for predicted vs. observed and residuals for input data for the two environmental conditions tested: a) warm, b) cold.

Figure 6.
Comparison of graphs for the neural netowrk method for predicted vs. observed and residuals for input data for the two environmental conditions tested: a) warm, b) cold.
Figure 6.
Comparison of graphs for the neural netowrk method for predicted vs. observed and residuals for input data for the two environmental conditions tested: a) warm, b) cold.

Figure 7.
Simplified scheme to handle the developed EV energy model.

Figure 8.
Tested vehicle for the research route from the city of Rzeszow (Poland).

Figure 9.
Maps of energy consumed, accumulated EV for two conditions of temperature, speed and acceleration for the route under study.
Figure 9.
Maps of energy consumed, accumulated EV for two conditions of temperature, speed and acceleration for the route under study.

Figure 10.
Investigated roundabout for EV traffic.

Figure 11.
Example view of data recorded from simulations from Vissim software.

Figure 12.
Example EV energy maps of the studied traffic circle from the Vissim program, along with cumulative energy graphs for all vehicles that appeared in the simulation.
Figure 12.
Example EV energy maps of the studied traffic circle from the Vissim program, along with cumulative energy graphs for all vehicles that appeared in the simulation.
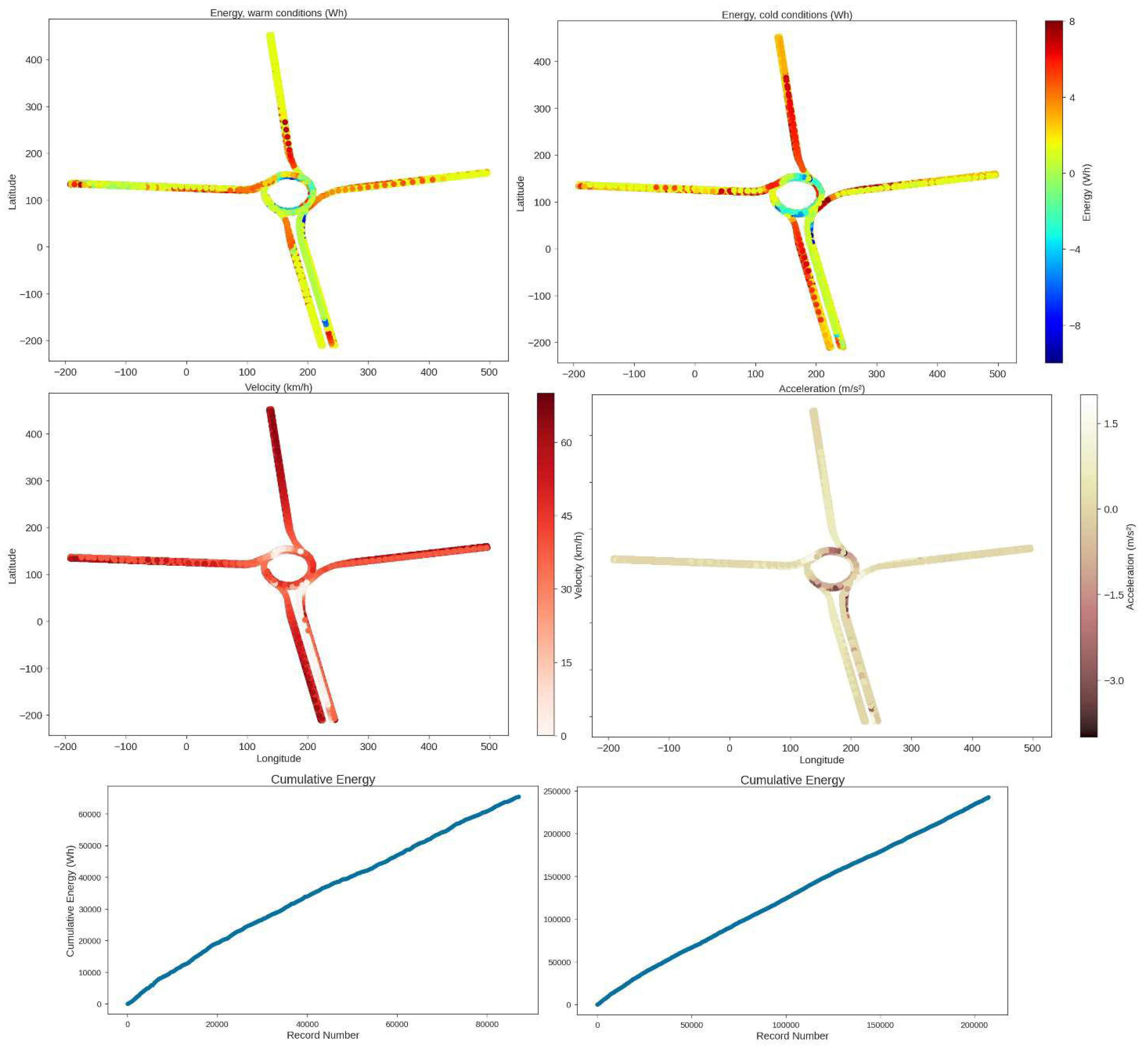

Table 1.
Selected parameters from road tests categorized into cold and warm environmental conditions.
Table 1.
Selected parameters from road tests categorized into cold and warm environmental conditions.
| Ambient conditions | Battery temp. start (Average) (°C) | Battery temp. end (Average) (°C) | Battery SOC Start (Average) | Battery SOC End (Average) | Ambient temp. (Average) (°C) | Cabin temp. (Average) (°C) | Distance sum (km) | Duration (min) |
|---|---|---|---|---|---|---|---|---|
| Cold | 6.57 | 11.14 | 68.81% | 47.93% | 2.21 | 22.00 | 168.44 | 195.12 |
| Warm | 22.86 | 24.00 | 78.91% | 69.40% | 22.64 | 24.43 | 126.35 | 191.76 |
Table 2.
Selected operational parameters of the EV.
| Parameter | Specification |
|---|---|
| Number of motor(s) | 1 |
| Motor type | Permanent magnet AC synchronous electric motor |
| Maximum power/at rpm | 125/4775 kW/rpm |
| Maximum regenerative brakepower | 55 kW |
| Curb weight (EU) | 1390 kg |
| Transmission type | Single-speed automatic transmission |
| Battery type | Lithium-ion |
| Battery configuration | 8 Modules (96 Cells Connected in Series) |
| Nominal battery pack capacity | 60 Ah |
| Acceleration (0-100 km/h | 7.9 s |
| Electric range (NEDC) | 170 km |
| Drivetrain | Rear wheel drive (RWD) |
Table 3.
Validation results of linear regression model for EV energy for different environmental conditions.
Table 3.
Validation results of linear regression model for EV energy for different environmental conditions.
| Conditions | Training MSE | Training R2 | Test MSE | Test R2 |
|---|---|---|---|---|
| warm | 4.211612 | 0.621058 | 3.957043 | 0.619025 |
| cold | 8.83428 | 0.635986 | 8.416843 | 0.627704 |
Table 4.
Validation results of random forest model for EV energy for different environmental conditions.
Table 4.
Validation results of random forest model for EV energy for different environmental conditions.
| Conditions | Training MSE | Training R2 | Test MSE | Test R2 |
|---|---|---|---|---|
| warm | 3.293970 | 0.703623 | 3.476304 | 0.665309 |
| cold | 6.589128 | 0.728497 | 6.528583 | 0.711226 |
Table 5.
Validation results of gradient boosting model for EV energy for different environmental conditions.
Table 5.
Validation results of gradient boosting model for EV energy for different environmental conditions.
| Conditions | Training MSE | Training R2 | Test MSE | Test R2 |
|---|---|---|---|---|
| warm | 1.214071 | 0.890763 | 1.506699 | 0.854938 |
| cold | 2.710946 | 0.888296 | 3.072594 | 0.864092 |
Table 6.
Neural network model validation results for EV energy for different environmental conditions.
Table 6.
Neural network model validation results for EV energy for different environmental conditions.
| Conditions | Training MSE | Training R2 | Test MSE | Test R2 |
|---|---|---|---|---|
| warm | 1.4057 | 0.8716 | 1.4727 | 0.8666 |
| cold | 3.0935 | 0.8694 | 2.8110 | 0.8870 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.





MDPI Initiatives
Important Links
© 2024 MDPI (Basel, Switzerland) unless otherwise stated